摘要:介绍了船舶减摇鳍的减摇原理和随动系统的组成,说明了可编程控制器在减摇鳍随动系统中的应用,同时讨论了程序设计方法。最后将设计完成后的系统应用于实际减摇鳍控制系统中,并对其进行了测试,结果表明应用PLC改造后的系统性能优良。 关键词:减摇鳍 PLC 随动系统 减摇鳍是最为行之有效的一种主动式船舶减摇装置,它的减摇效率高,经过60多年的发展,已广泛应用于各种船舶中。它的减摇原理是:船舶在水中行驶过程中,当鳍在水中有一个速度和倾斜角的时候,就会产生一个升力,利用此升力产生的力矩来抵抗海浪的干扰力矩,便可达到减小船舶横摇的目的。随着科学技术的发展,减摇鳍系统正在逐步完善,减摇效果也在不断提高。 近年来,在工业生产的自动化控制领域中,正普遍利用一种新型控制设备——可编程控制器PLC。目前的PLC正在向着精度更高、功能更多、使用更方便的方向发展。从PLC的发展趋势来看,PLC控制技术将成为今后工业自动化的主要手段。将其引入减摇鳍控制系统中,实现数字化控制,将进一步提高控制系统的灵活性和可靠性。 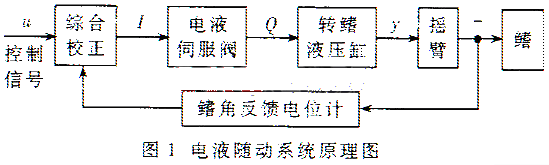 1 减摇鳍随动系统的构成及工作原理 减摇鳍的随动系统连接来自控制系统的控制信号,是转鳍机构的中间转换和功率放大环节。改造前,每个随动系统由%26;#177;15V稳压电源板DYCJ、综合放大板SKCJ、操纵转换板SCCJ、液压控制系统以用转鳍机构、反馈、限位元件等组成。随动系统应尽可能“快速、准确、稳定”地工作。目前,大多数减摇鳍的随动系统都是“电-液随动系统”。本系统以NJ4型减摇鳍的阀控式电液随动系统为原型,对其做了适当的改进,下面进行详细介绍。 原有随动系统的工作原理图如图1所示。首先将来自控制器的信号送到综合放大电路板SKCJ(该插件板能对控制信号进行隔离),与升力反馈信号进行代数求和、校正、放大,然后再与鳍角反馈信号进行二次代数求和、校正、放大,接着送到鳍机械组合体上的射流管电液伺服阀,进行电-液信号转换。电液伺服阀根据SKCJ板输出信号的大小和极性调节来自油源机组的液压油的流量和流向,使液压缸的活塞速度和运动方向发生变化,带动鳍机械组合体上的摇臂转动,使鳍转动到一定的角度产生相应的对抗力矩。 改造后,以上各功能完全由PLC实现,原有随动系统中的各电源、插件板也将由PLC各模块取代。 2 随动系统的改造 2.1 减摇鳍随动系统的改造设计 PLC随动系统接收来自控制器的控制信号,经过处理后传递给伺服系统,驱动减摇鳍移动到指定位置,同时将输出信号反馈回PLC,构成控制回路。系统改造后的原理如图2所示。
1 减摇鳍随动系统的构成及工作原理 减摇鳍的随动系统连接来自控制系统的控制信号,是转鳍机构的中间转换和功率放大环节。改造前,每个随动系统由%26;#177;15V稳压电源板DYCJ、综合放大板SKCJ、操纵转换板SCCJ、液压控制系统以用转鳍机构、反馈、限位元件等组成。随动系统应尽可能“快速、准确、稳定”地工作。目前,大多数减摇鳍的随动系统都是“电-液随动系统”。本系统以NJ4型减摇鳍的阀控式电液随动系统为原型,对其做了适当的改进,下面进行详细介绍。 原有随动系统的工作原理图如图1所示。首先将来自控制器的信号送到综合放大电路板SKCJ(该插件板能对控制信号进行隔离),与升力反馈信号进行代数求和、校正、放大,然后再与鳍角反馈信号进行二次代数求和、校正、放大,接着送到鳍机械组合体上的射流管电液伺服阀,进行电-液信号转换。电液伺服阀根据SKCJ板输出信号的大小和极性调节来自油源机组的液压油的流量和流向,使液压缸的活塞速度和运动方向发生变化,带动鳍机械组合体上的摇臂转动,使鳍转动到一定的角度产生相应的对抗力矩。 改造后,以上各功能完全由PLC实现,原有随动系统中的各电源、插件板也将由PLC各模块取代。 2 随动系统的改造 2.1 减摇鳍随动系统的改造设计 PLC随动系统接收来自控制器的控制信号,经过处理后传递给伺服系统,驱动减摇鳍移动到指定位置,同时将输出信号反馈回PLC,构成控制回路。系统改造后的原理如图2所示。 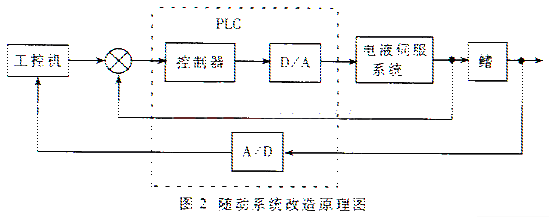 2.2 系统中PLC的选择 由于船舶航行在环境瞬息万变的海面上,工作环境非常恶劣,比如机舱内的温度能够达到55℃,湿度更可以达到95%,并且存在各种强烈的冲击、振动和盐雾,这就要求安装在舰船上的减摇鳍系统有较强的抗干扰能力。而船舶上空间狭小,对所安装设备的体积也有一定的要求。由于减摇鳍随动系统工作环境的特殊性,对系统中的PLC有较高的要求。考虑到性能指标、功能、体积和价格等因素,本文选择了松下电工的FP0系列可编程控制器。 系统主要包括电源单元、控制单元和两个模拟量输入输出单元。PLC工作环境温度在0~55℃范围内,工作环境相对湿度为30%~85%,模拟输入与PLC内部电路之间采用光电耦合器进行隔离,同时输入输出端设置滤波器,使之符合减摇鳍系统工作环境的要求。 2.3 PLC软件实现的功能 根据系统要求,程序需要实现以下功能: (1)对来自系统油源机组的信号进行检测,如发现油温、油位等出现故障,系统停机并自动报警。 (2)对来自控制器的输入信号进行检测,保证其始终被限定在规定范围内,以保证减摇鳍工作转角不超过其极限值;并对控制信号按一定控制规律进行处理。 (3)在鳍转动工作时,将从鳍角电位计接收到的反馈信号与输入的控制信号进行比较,构成回路,实现负反馈。将控制信号与反馈信号综合处理得到的结果作为控制指令发送给输出端口。 (4)检测PLC输出给电液伺服阀的信号是否超过额定范围,如超出则做相应处理,保证伺服阀和减摇鳍正常安全地工作。 (5)在工作前或停机时根据操作需要随时将减摇鳍运行到零位或其它需要的位置。 随动系统软件功能框图如图3所示。
2.2 系统中PLC的选择 由于船舶航行在环境瞬息万变的海面上,工作环境非常恶劣,比如机舱内的温度能够达到55℃,湿度更可以达到95%,并且存在各种强烈的冲击、振动和盐雾,这就要求安装在舰船上的减摇鳍系统有较强的抗干扰能力。而船舶上空间狭小,对所安装设备的体积也有一定的要求。由于减摇鳍随动系统工作环境的特殊性,对系统中的PLC有较高的要求。考虑到性能指标、功能、体积和价格等因素,本文选择了松下电工的FP0系列可编程控制器。 系统主要包括电源单元、控制单元和两个模拟量输入输出单元。PLC工作环境温度在0~55℃范围内,工作环境相对湿度为30%~85%,模拟输入与PLC内部电路之间采用光电耦合器进行隔离,同时输入输出端设置滤波器,使之符合减摇鳍系统工作环境的要求。 2.3 PLC软件实现的功能 根据系统要求,程序需要实现以下功能: (1)对来自系统油源机组的信号进行检测,如发现油温、油位等出现故障,系统停机并自动报警。 (2)对来自控制器的输入信号进行检测,保证其始终被限定在规定范围内,以保证减摇鳍工作转角不超过其极限值;并对控制信号按一定控制规律进行处理。 (3)在鳍转动工作时,将从鳍角电位计接收到的反馈信号与输入的控制信号进行比较,构成回路,实现负反馈。将控制信号与反馈信号综合处理得到的结果作为控制指令发送给输出端口。 (4)检测PLC输出给电液伺服阀的信号是否超过额定范围,如超出则做相应处理,保证伺服阀和减摇鳍正常安全地工作。 (5)在工作前或停机时根据操作需要随时将减摇鳍运行到零位或其它需要的位置。 随动系统软件功能框图如图3所示。 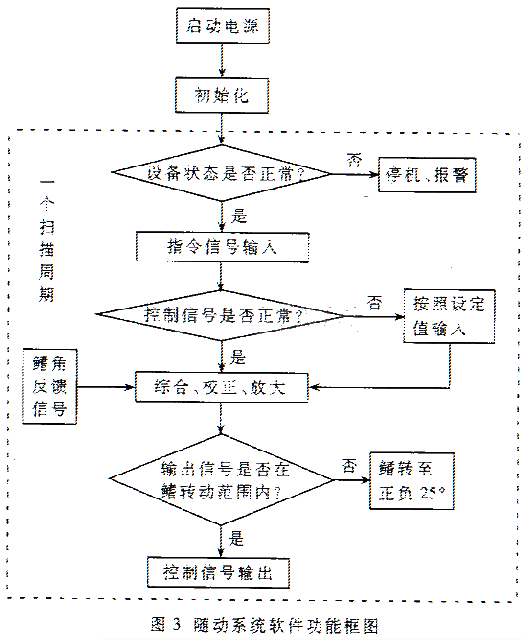 2.4 系统改造中存在的问题及解决方法 系统正常工作时,油温应低于60℃,油位应大于300mm,若超出上述指标,设在油箱内部的传感器开关将闭合,输出电压信号。为实现对油温和油位的检测,需要将代表油温和油压的两路信号输入给PLC进行检查这样将占用PLC模拟量输入/输出单元的两个输入端口,增加单元块的数量。考虑到油温和油压变化较缓慢 没有必要时刻监视其变化,因此用软件设置定时器,控制两个继电器交替开关,使油温和油压信号只通过一路通道交替输入PLC,在PLC内部进行检测达到降低成本的目的。 不同鳍工作时的饱和角度不同,设计中将鳍的正常工作角度设定在%26;#177;25%26;#176;以内。根据真实鳍角与反馈电压的比例关系,可以确定鳍角在%26;#177;25%26;#176;时对应的反馈电压是%26;#177;2.2V,将这两个电压值作为PLC对输入电压信号进行检测的参考值。在PLC程序中分别用十进制数值%26;#177;K440表示两个参考电压。PLC控制信号在输出给电液伺服阀前也要进行检测,这一步检测的标准不是减摇鳍的工作额定电压,而是电液伺服阀的额定电流,目的是保证伺服阀可以正常安全工作。伺服阀工作的额定电流为%26;#177;8mA,线圈电阻为1000%26;#177;100Ω。由于FP0系列PLC输出电流范围在0~20mA之间,无法为伺服阀提供负电流,但PLC的电压输出范围在%26;#177;10V之间,因此将电压值作为指令信号输入伺服阀。伺服阀串联后线圈电阻为2000Ω,由此得到伺服阀工作的电压可以达到%26;#177;16V。系统设计中,为使伺服阀始终工作在线性区,将PLC对伺服阀的输入电压限定在%26;#177;8V以内在PLC程序中分别用%26;#177;K1600表示两个参考电压如指令信号在%26;#177;8V之内,则正常输出,如果超过%26;#177;8V的范围,则按照%26;#177;8V输出。
2.4 系统改造中存在的问题及解决方法 系统正常工作时,油温应低于60℃,油位应大于300mm,若超出上述指标,设在油箱内部的传感器开关将闭合,输出电压信号。为实现对油温和油位的检测,需要将代表油温和油压的两路信号输入给PLC进行检查这样将占用PLC模拟量输入/输出单元的两个输入端口,增加单元块的数量。考虑到油温和油压变化较缓慢 没有必要时刻监视其变化,因此用软件设置定时器,控制两个继电器交替开关,使油温和油压信号只通过一路通道交替输入PLC,在PLC内部进行检测达到降低成本的目的。 不同鳍工作时的饱和角度不同,设计中将鳍的正常工作角度设定在%26;#177;25%26;#176;以内。根据真实鳍角与反馈电压的比例关系,可以确定鳍角在%26;#177;25%26;#176;时对应的反馈电压是%26;#177;2.2V,将这两个电压值作为PLC对输入电压信号进行检测的参考值。在PLC程序中分别用十进制数值%26;#177;K440表示两个参考电压。PLC控制信号在输出给电液伺服阀前也要进行检测,这一步检测的标准不是减摇鳍的工作额定电压,而是电液伺服阀的额定电流,目的是保证伺服阀可以正常安全工作。伺服阀工作的额定电流为%26;#177;8mA,线圈电阻为1000%26;#177;100Ω。由于FP0系列PLC输出电流范围在0~20mA之间,无法为伺服阀提供负电流,但PLC的电压输出范围在%26;#177;10V之间,因此将电压值作为指令信号输入伺服阀。伺服阀串联后线圈电阻为2000Ω,由此得到伺服阀工作的电压可以达到%26;#177;16V。系统设计中,为使伺服阀始终工作在线性区,将PLC对伺服阀的输入电压限定在%26;#177;8V以内在PLC程序中分别用%26;#177;K1600表示两个参考电压如指令信号在%26;#177;8V之内,则正常输出,如果超过%26;#177;8V的范围,则按照%26;#177;8V输出。 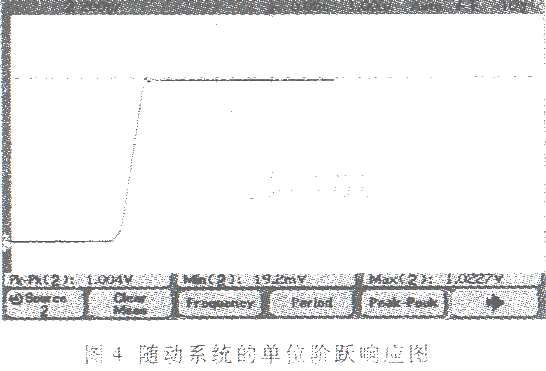 由于松下FP0系列PLC的PID命令不支持负数运算,所以随动系统控制部分采用自行设计的PD控制命令。每次程序启动前PLC都先自动对各主要寄存器清零,以消除程序启动时系统产生不必要的动作。另外由于松下FP0型号不提供小数运算,因此对无法整除的数据只能采用四舍五入的处理方法,比例系数只能设定成整数。为了克服这一缺点,程序先将存储于DT20中的指令信号与鳍角反馈信号的差值乘以一个十进制的系数(如K47),将得到的数值存储在DT30中,再将DT30中的数据除以一个十进制系数(如K10),这样最终得到的数据与DT20中的数值直接乘以4.7后的结果几乎完全相同,有时两者之间会存在一个很小的偏差,可以忽略不计。这样就解决了比例系数只能是整数的不足,更准确地实现了比例控制。 2.5 随动系统性能分析 系统软件设计完毕后,按要求安装,对各端口进行测试,确保可以正常工作后将系统启动。给设计完成的随动系统输入一个幅值为1V的阶跃信号,得到系统的单位阶跃响应如图4所示。 从图中可以看到,系统的最大超调量在2%以内,上升时间小于0.6s,过渡时间小于0.8s,暂态过程中的振荡次数为3。上述各项指标完全符合减摇鳍随动系统的工作要求。 除了良好的暂态品质以外,还要求足够的稳态控制精度5。稳态控制精度反映了对系统的稳态特性或控制的稳态精度的要求。对于恒值控制系统,在工作中如果给定值不变,要求输出量也不变,因此注意的是扰动量所引起的稳态误差;而对于随动系统,给定量以任意规律变化,则要求输出量以一定的精度跟随给定量变化,因此注意的是被控量和给定量之间的误差。在检测随动系统性能的实验中,输入的阶跃信号幅值为1V,系统的稳态输出为0.986V,稳态误差小于2%。上述各种指标均符合减摇鳍系统对随动系统的要求。
由于松下FP0系列PLC的PID命令不支持负数运算,所以随动系统控制部分采用自行设计的PD控制命令。每次程序启动前PLC都先自动对各主要寄存器清零,以消除程序启动时系统产生不必要的动作。另外由于松下FP0型号不提供小数运算,因此对无法整除的数据只能采用四舍五入的处理方法,比例系数只能设定成整数。为了克服这一缺点,程序先将存储于DT20中的指令信号与鳍角反馈信号的差值乘以一个十进制的系数(如K47),将得到的数值存储在DT30中,再将DT30中的数据除以一个十进制系数(如K10),这样最终得到的数据与DT20中的数值直接乘以4.7后的结果几乎完全相同,有时两者之间会存在一个很小的偏差,可以忽略不计。这样就解决了比例系数只能是整数的不足,更准确地实现了比例控制。 2.5 随动系统性能分析 系统软件设计完毕后,按要求安装,对各端口进行测试,确保可以正常工作后将系统启动。给设计完成的随动系统输入一个幅值为1V的阶跃信号,得到系统的单位阶跃响应如图4所示。 从图中可以看到,系统的最大超调量在2%以内,上升时间小于0.6s,过渡时间小于0.8s,暂态过程中的振荡次数为3。上述各项指标完全符合减摇鳍随动系统的工作要求。 除了良好的暂态品质以外,还要求足够的稳态控制精度5。稳态控制精度反映了对系统的稳态特性或控制的稳态精度的要求。对于恒值控制系统,在工作中如果给定值不变,要求输出量也不变,因此注意的是扰动量所引起的稳态误差;而对于随动系统,给定量以任意规律变化,则要求输出量以一定的精度跟随给定量变化,因此注意的是被控量和给定量之间的误差。在检测随动系统性能的实验中,输入的阶跃信号幅值为1V,系统的稳态输出为0.986V,稳态误差小于2%。上述各种指标均符合减摇鳍系统对随动系统的要求。 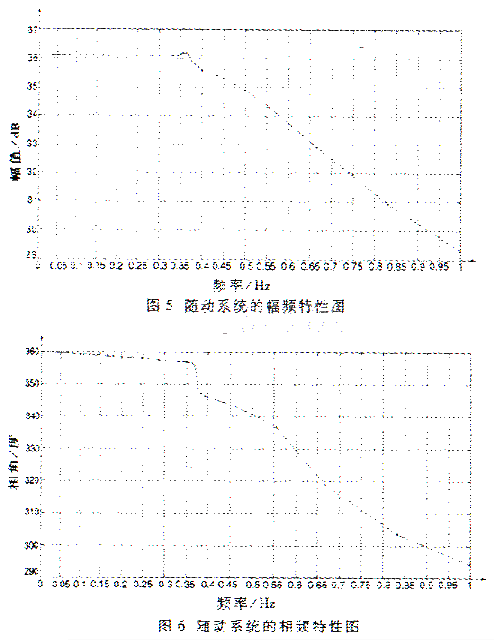 根据鳍角与鳍角反馈电压的比例关系图,将输入幅值在%26;#177;0.9V之间变化的正弦信号作为指令信号,使减摇鳍在指令信号的控制下,在%26;#177;10%26;#176;之间来回摆动。保持指令信号的幅值不变,改变信号的频率,得到被控系统相应的幅值和相角。根据实验数据可以得到随动系统的幅频特性和相频特性,分别如图5和图6所示。需要注意的是,系统频率特性图中的横坐标不是通常使用的对数分度lgω,而是直接使用ω。 观察随动系统的幅频特性图可以看出,系统在频率小于0.35Hz之前表现出了类似放大环节的特性,且此时系统的输出几乎没有任何明显变化,与角频率变化无关,非常准确地实现了指令信号的输出,系统非常稳定。从0.35Hz开始,随着频率的增大,系统的幅频特性和相频特性均发生了改变。从整个变化过程来看,系统表现出类似惯性环节的特性,因此可以将ω=0.35Hz近似地认为是系统的转折频率或交接频率。 与幅频特性相同,随动系统的相频特性图也显示出系统在ω=0.35Hz之前的相角滞后非常小,在5%26;#176;以内,可以忽略不计。在0.35Hz之后相角发生了明显的变化,整个变化趋势也类似于一个惯性环节。但与典型的惯性环节不同,在所认为的转折频率ω=0.35Hz处,系统的相角没有滞后45%26;#176;左右,系统也没有象典型惯性环节一样相移-arctgTω,与角频率ω表现出严格的反正切关系。 从整个系统表现出的幅频特性和相频特性来看,改造后的随动系统可以近似地认为是由一个放大环节与惯性环节串联组成,系统在频率小于0.35Hz的低频段表现出了较好的性能,符合减摇鳍系统对随动系统的要求,可以很好地工作。 由于PLC在软件和硬件上具有突出的优点,随动系统的稳定性和精度都有所提高,系统的安装和修改也更为简单方便。经过运行测试,改造后的随动系统符合设计要求,能够稳定运行,确保了船舶减摇鳍系统的正常工作。随动系统的改造完成后,将利用可编程控制器继续完成减摇鳍控制器的设计,从而形成一套完整的应用可编程控制器实现的船舶减摇控制系统。
根据鳍角与鳍角反馈电压的比例关系图,将输入幅值在%26;#177;0.9V之间变化的正弦信号作为指令信号,使减摇鳍在指令信号的控制下,在%26;#177;10%26;#176;之间来回摆动。保持指令信号的幅值不变,改变信号的频率,得到被控系统相应的幅值和相角。根据实验数据可以得到随动系统的幅频特性和相频特性,分别如图5和图6所示。需要注意的是,系统频率特性图中的横坐标不是通常使用的对数分度lgω,而是直接使用ω。 观察随动系统的幅频特性图可以看出,系统在频率小于0.35Hz之前表现出了类似放大环节的特性,且此时系统的输出几乎没有任何明显变化,与角频率变化无关,非常准确地实现了指令信号的输出,系统非常稳定。从0.35Hz开始,随着频率的增大,系统的幅频特性和相频特性均发生了改变。从整个变化过程来看,系统表现出类似惯性环节的特性,因此可以将ω=0.35Hz近似地认为是系统的转折频率或交接频率。 与幅频特性相同,随动系统的相频特性图也显示出系统在ω=0.35Hz之前的相角滞后非常小,在5%26;#176;以内,可以忽略不计。在0.35Hz之后相角发生了明显的变化,整个变化趋势也类似于一个惯性环节。但与典型的惯性环节不同,在所认为的转折频率ω=0.35Hz处,系统的相角没有滞后45%26;#176;左右,系统也没有象典型惯性环节一样相移-arctgTω,与角频率ω表现出严格的反正切关系。 从整个系统表现出的幅频特性和相频特性来看,改造后的随动系统可以近似地认为是由一个放大环节与惯性环节串联组成,系统在频率小于0.35Hz的低频段表现出了较好的性能,符合减摇鳍系统对随动系统的要求,可以很好地工作。 由于PLC在软件和硬件上具有突出的优点,随动系统的稳定性和精度都有所提高,系统的安装和修改也更为简单方便。经过运行测试,改造后的随动系统符合设计要求,能够稳定运行,确保了船舶减摇鳍系统的正常工作。随动系统的改造完成后,将利用可编程控制器继续完成减摇鳍控制器的设计,从而形成一套完整的应用可编程控制器实现的船舶减摇控制系统。
编辑:冀凯 引用地址:可编程控制器在船舶减摇鳍随动系统中的应用
1 减摇鳍随动系统的构成及工作原理 减摇鳍的随动系统连接来自控制系统的控制信号,是转鳍机构的中间转换和功率放大环节。改造前,每个随动系统由%26;#177;15V稳压电源板DYCJ、综合放大板SKCJ、操纵转换板SCCJ、液压控制系统以用转鳍机构、反馈、限位元件等组成。随动系统应尽可能“快速、准确、稳定”地工作。目前,大多数减摇鳍的随动系统都是“电-液随动系统”。本系统以NJ4型减摇鳍的阀控式电液随动系统为原型,对其做了适当的改进,下面进行详细介绍。 原有随动系统的工作原理图如图1所示。首先将来自控制器的信号送到综合放大电路板SKCJ(该插件板能对控制信号进行隔离),与升力反馈信号进行代数求和、校正、放大,然后再与鳍角反馈信号进行二次代数求和、校正、放大,接着送到鳍机械组合体上的射流管电液伺服阀,进行电-液信号转换。电液伺服阀根据SKCJ板输出信号的大小和极性调节来自油源机组的液压油的流量和流向,使液压缸的活塞速度和运动方向发生变化,带动鳍机械组合体上的摇臂转动,使鳍转动到一定的角度产生相应的对抗力矩。 改造后,以上各功能完全由PLC实现,原有随动系统中的各电源、插件板也将由PLC各模块取代。 2 随动系统的改造 2.1 减摇鳍随动系统的改造设计 PLC随动系统接收来自控制器的控制信号,经过处理后传递给伺服系统,驱动减摇鳍移动到指定位置,同时将输出信号反馈回PLC,构成控制回路。系统改造后的原理如图2所示。 2.2 系统中PLC的选择 由于船舶航行在环境瞬息万变的海面上,工作环境非常恶劣,比如机舱内的温度能够达到55℃,湿度更可以达到95%,并且存在各种强烈的冲击、振动和盐雾,这就要求安装在舰船上的减摇鳍系统有较强的抗干扰能力。而船舶上空间狭小,对所安装设备的体积也有一定的要求。由于减摇鳍随动系统工作环境的特殊性,对系统中的PLC有较高的要求。考虑到性能指标、功能、体积和价格等因素,本文选择了松下电工的FP0系列可编程控制器。 系统主要包括电源单元、控制单元和两个模拟量输入输出单元。PLC工作环境温度在0~55℃范围内,工作环境相对湿度为30%~85%,模拟输入与PLC内部电路之间采用光电耦合器进行隔离,同时输入输出端设置滤波器,使之符合减摇鳍系统工作环境的要求。 2.3 PLC软件实现的功能 根据系统要求,程序需要实现以下功能: (1)对来自系统油源机组的信号进行检测,如发现油温、油位等出现故障,系统停机并自动报警。 (2)对来自控制器的输入信号进行检测,保证其始终被限定在规定范围内,以保证减摇鳍工作转角不超过其极限值;并对控制信号按一定控制规律进行处理。 (3)在鳍转动工作时,将从鳍角电位计接收到的反馈信号与输入的控制信号进行比较,构成回路,实现负反馈。将控制信号与反馈信号综合处理得到的结果作为控制指令发送给输出端口。 (4)检测PLC输出给电液伺服阀的信号是否超过额定范围,如超出则做相应处理,保证伺服阀和减摇鳍正常安全地工作。 (5)在工作前或停机时根据操作需要随时将减摇鳍运行到零位或其它需要的位置。 随动系统软件功能框图如图3所示。 2.4 系统改造中存在的问题及解决方法 系统正常工作时,油温应低于60℃,油位应大于300mm,若超出上述指标,设在油箱内部的传感器开关将闭合,输出电压信号。为实现对油温和油位的检测,需要将代表油温和油压的两路信号输入给PLC进行检查这样将占用PLC模拟量输入/输出单元的两个输入端口,增加单元块的数量。考虑到油温和油压变化较缓慢 没有必要时刻监视其变化,因此用软件设置定时器,控制两个继电器交替开关,使油温和油压信号只通过一路通道交替输入PLC,在PLC内部进行检测达到降低成本的目的。 不同鳍工作时的饱和角度不同,设计中将鳍的正常工作角度设定在%26;#177;25%26;#176;以内。根据真实鳍角与反馈电压的比例关系,可以确定鳍角在%26;#177;25%26;#176;时对应的反馈电压是%26;#177;2.2V,将这两个电压值作为PLC对输入电压信号进行检测的参考值。在PLC程序中分别用十进制数值%26;#177;K440表示两个参考电压。PLC控制信号在输出给电液伺服阀前也要进行检测,这一步检测的标准不是减摇鳍的工作额定电压,而是电液伺服阀的额定电流,目的是保证伺服阀可以正常安全工作。伺服阀工作的额定电流为%26;#177;8mA,线圈电阻为1000%26;#177;100Ω。由于FP0系列PLC输出电流范围在0~20mA之间,无法为伺服阀提供负电流,但PLC的电压输出范围在%26;#177;10V之间,因此将电压值作为指令信号输入伺服阀。伺服阀串联后线圈电阻为2000Ω,由此得到伺服阀工作的电压可以达到%26;#177;16V。系统设计中,为使伺服阀始终工作在线性区,将PLC对伺服阀的输入电压限定在%26;#177;8V以内在PLC程序中分别用%26;#177;K1600表示两个参考电压如指令信号在%26;#177;8V之内,则正常输出,如果超过%26;#177;8V的范围,则按照%26;#177;8V输出。 由于松下FP0系列PLC的PID命令不支持负数运算,所以随动系统控制部分采用自行设计的PD控制命令。每次程序启动前PLC都先自动对各主要寄存器清零,以消除程序启动时系统产生不必要的动作。另外由于松下FP0型号不提供小数运算,因此对无法整除的数据只能采用四舍五入的处理方法,比例系数只能设定成整数。为了克服这一缺点,程序先将存储于DT20中的指令信号与鳍角反馈信号的差值乘以一个十进制的系数(如K47),将得到的数值存储在DT30中,再将DT30中的数据除以一个十进制系数(如K10),这样最终得到的数据与DT20中的数值直接乘以4.7后的结果几乎完全相同,有时两者之间会存在一个很小的偏差,可以忽略不计。这样就解决了比例系数只能是整数的不足,更准确地实现了比例控制。 2.5 随动系统性能分析 系统软件设计完毕后,按要求安装,对各端口进行测试,确保可以正常工作后将系统启动。给设计完成的随动系统输入一个幅值为1V的阶跃信号,得到系统的单位阶跃响应如图4所示。 从图中可以看到,系统的最大超调量在2%以内,上升时间小于0.6s,过渡时间小于0.8s,暂态过程中的振荡次数为3。上述各项指标完全符合减摇鳍随动系统的工作要求。 除了良好的暂态品质以外,还要求足够的稳态控制精度5。稳态控制精度反映了对系统的稳态特性或控制的稳态精度的要求。对于恒值控制系统,在工作中如果给定值不变,要求输出量也不变,因此注意的是扰动量所引起的稳态误差;而对于随动系统,给定量以任意规律变化,则要求输出量以一定的精度跟随给定量变化,因此注意的是被控量和给定量之间的误差。在检测随动系统性能的实验中,输入的阶跃信号幅值为1V,系统的稳态输出为0.986V,稳态误差小于2%。上述各种指标均符合减摇鳍系统对随动系统的要求。 根据鳍角与鳍角反馈电压的比例关系图,将输入幅值在%26;#177;0.9V之间变化的正弦信号作为指令信号,使减摇鳍在指令信号的控制下,在%26;#177;10%26;#176;之间来回摆动。保持指令信号的幅值不变,改变信号的频率,得到被控系统相应的幅值和相角。根据实验数据可以得到随动系统的幅频特性和相频特性,分别如图5和图6所示。需要注意的是,系统频率特性图中的横坐标不是通常使用的对数分度lgω,而是直接使用ω。 观察随动系统的幅频特性图可以看出,系统在频率小于0.35Hz之前表现出了类似放大环节的特性,且此时系统的输出几乎没有任何明显变化,与角频率变化无关,非常准确地实现了指令信号的输出,系统非常稳定。从0.35Hz开始,随着频率的增大,系统的幅频特性和相频特性均发生了改变。从整个变化过程来看,系统表现出类似惯性环节的特性,因此可以将ω=0.35Hz近似地认为是系统的转折频率或交接频率。 与幅频特性相同,随动系统的相频特性图也显示出系统在ω=0.35Hz之前的相角滞后非常小,在5%26;#176;以内,可以忽略不计。在0.35Hz之后相角发生了明显的变化,整个变化趋势也类似于一个惯性环节。但与典型的惯性环节不同,在所认为的转折频率ω=0.35Hz处,系统的相角没有滞后45%26;#176;左右,系统也没有象典型惯性环节一样相移-arctgTω,与角频率ω表现出严格的反正切关系。 从整个系统表现出的幅频特性和相频特性来看,改造后的随动系统可以近似地认为是由一个放大环节与惯性环节串联组成,系统在频率小于0.35Hz的低频段表现出了较好的性能,符合减摇鳍系统对随动系统的要求,可以很好地工作。 由于PLC在软件和硬件上具有突出的优点,随动系统的稳定性和精度都有所提高,系统的安装和修改也更为简单方便。经过运行测试,改造后的随动系统符合设计要求,能够稳定运行,确保了船舶减摇鳍系统的正常工作。随动系统的改造完成后,将利用可编程控制器继续完成减摇鳍控制器的设计,从而形成一套完整的应用可编程控制器实现的船舶减摇控制系统。
上一篇:CPLD器件在时间统一系统中的应用
下一篇:RS编译码的一种硬件解决方案
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 TDA8571J/N2S,112
TDA8571J/N2S,112
小广播
热门活动
换一批
更多

最新半导体设计/制造文章
更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
- 今天上午10:0有奖直播|完美替代传统汽车钥匙?探索英飞凌数字钥匙解决方案
- 【有奖直播】 聚焦语音识别核心技术,走进Microchip Timberwolf™音频处理器研讨会
- 下载送好礼|人工智能物联网时代即将来临,您准备好了吗?
- Mentor线上研讨会丨FPGA仿真验证平台ModelSim应用进阶
- 有奖直播:Littelfuse电动车充电桩及车载充电器保护设计方案
- 免费申请TI 样片,晒单赢好礼!
- Wi-Fi智能战队征集令,Open1081免费试用进行中...
- ADI有奖直播:基准电压源产品技术及应用选择 7月25日上午10:00-11:30 不容错过~
- 2021 STM32全国巡回研讨会线上直播报名倒计时!
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号