0 引言
经济发展与能源日益短缺的矛盾一直都是现代社会面临的一大难题,资源的紧缺和能源成本的持续增长使得众多发达国家将注意的目光转向了新能源,其中太阳能光伏发电的应用备受重视。太阳能光伏发电系统主要由太阳电池板(组件)、控制器和逆变器三大部分组成。其中控制器即为太阳能追踪采集系统,是实现太阳能电池板追踪太阳方向,使太阳光线始终能垂直照射太阳能电池板,以实现光伏发电最大化的机电控制装置,是太阳能光伏发电不可缺少的重要组成部分。
目前,太阳追踪的控制系统划分不外乎三类:闭环、开环、混合控制方式。实际应用中,常用的有光电追踪和视日运动轨迹追踪两种方式;前者是闭环的随机系统,后者是开环的程控系统。视日运动轨迹追踪的优点
是能够全天候实时追踪,但算法复杂且固定,导致处理速度慢,追踪轨迹固定,不能因地制宜、因时制宜地对太阳进行快速追踪;光电追踪灵敏度高,但受天气的影响很大,甚至会引起误动。
本文提出一种基于MSP430单片机的太阳能追踪采集系统设计方案,综合光电追踪和视日运动轨迹追踪,即混合控制方式,其特点是在进行轨迹追踪时并不需要像单一视日运动追踪方式采用复杂算法,从而减少控制器运算时间,提高处理速度;同时又避免了光电追踪方式的误动。能够根据时钟时间和光电检测自动调整硅太阳能电池板的方位角、俯仰角,结构简单、成本低,而且可以通过无线射频通信实现远程实时监控,特别适合在复杂环境无人值守情况下,有较好的应用价值。
1 系统组成及设计
太阳能追踪采集系统由无线数据发送及控制端、无线数据接收端和机械装置端三大部分组成,又可细分为微控制模块、电机控制模块、光强检测模块、温度检测模块、太阳能充电模块、实时时钟模块、无线射频模块、电源电路模块、液晶显示模块、串行通信模块和键盘控制
模块等11个功能模块,系统的结构框图如图1所示。
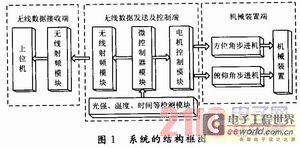
无线数据发送及控制端中的光强、时间、温度等检测模块会把太阳光照强度、天气温度、时钟时间、电池充电状态等信息采集到微控制器模块,通过对白天黑夜、天气晴阴的辨别以及此刻的时钟时间,微控制器模块会适时地驱动电机控制模块,调整机械装置端,实现太阳能自动追踪的控制。
同时无线数据发送及控制端又会把这些采集来的信息通过无线射频模块发送到无线数据接收端,然后上传上位机实时显示,实现远距离监控。
1.1 光电检测模块设计
光电二极管是在反向电压作用下工作的,没有光照时,反向电流极其微弱,叫暗电流;有光照时,反向电流迅速增大到几十微安,称为光电流。光的强度越大,反向电流也越大。光的变化引起光电二极管电流变化,这就可以把光信号转换成电信号,成为光电传感器件。而硅太阳能电池板实际上也是一个大面积的PN结,把太阳幅射能直接转换成电流,原理和光电二极管一样。
光强度检测模块包括两部分,一个是利用光电二极管光强感应对天气晴阴的判断,如图2(a)所示;另一部分在太阳能充电模块中,对硅太阳能电池板上受到的阳光照射强度的测量,如图2(b)圈起部分。光电二极管对光强的敏感产生相应大小的电流,电阻R10把电流信号转换为电压信号,通过MSP430单片机的AD1212位模数转换器采样出相应的电压值,相应的也就得到该时刻光强度,用以判断天气的晴阴。硅太阳能电池板是电流型的,随着光强的增强其输出的电流强度亦会增加,根据这一特点,运用AD12,在太阳能电池板随太阳动态旋转时可以记录各个角度的光强度,产生光照强度系列值,然后再把太阳能电池板精确调整到光照强度最强的方位角和俯仰角的位置上。

1.2 太阳能充电模块设计
如图2(b)太阳能充电模块的电路设计,设计主要围绕太阳能电池供电的锂电池充电管理芯片CN3063进行,应用5~6 V硅太阳能电池板可为单节4.2 V锂电池或镍锌电池充电。D5,D4是充电状态的指示灯,D5是红色LED表示正在充电,D4是绿色LED表示充电完成;为了详细了解电池电量状况,利用MSP430中12位ADC对电池两端电压、电流进行A/D采样,确定电量从空到满的5种状态(如图3,在液晶屏上显示);P6.2,R7,R8是用作对硅太阳能电池板进行光强测量的,J6是太阳能电池板的充电接口。
![]()
1.3 无线射频模块设计
为了实现远程监控,系统采用Nordic Semiconductor ASA公司推出的单片射频收发器nRF905,设计了无线射频模块来实现无线数据传输。单片机通过软件模拟SPI传输方式和nRF905通信,把外界采集的数据传输到上位机。nRF905与MSP430接口电路如图4所示。
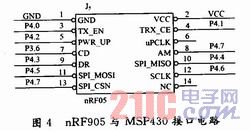
nRF905常用的10个引脚:和MCU通信的SPI接口的4个引脚分别是数据线SPI_MOSI,SPI_MISO,时钟线SCLK,使能线SPI_CSN;MCU的3个控制线分别为控制工作状态的PWR_UP,控制正常工作的TX_EN,选择发送或接收方式的TRX_CE;nRF905的3个反馈线分别为检测到频道正被使用的CD(Carrier Detected),通知接收地址正确的AM(Address Matched),告诉MCU数据接收正确的DR(Data Received)。图5是nRF905的发送和接收时序图。

1.4 其他模块设计
无线数据接收端由微控制器模块、无线射频模块和串行通信模块3个模块组成;而无线数据发送及控制端包含所有11个模块;机械装置端主要由两个步进电机和硅太阳能电池板组成。
(1)微控制器模块:无线数据接收端采用AT89S52 8位单片机;无线数据发送及控制端选用MSP430F149 16位超低功耗单片机,其自带的ADC12模数转换器提供8通道12位A/D采样;
(2)电机控制模块:由L298双路全桥式驱动芯片控制2个四相八拍的步进电机,以带动太阳能电池板实现方位角、俯仰角两个自由度的角度调整;
(3)温度检测模块:采用Dalias公司生产DS18B20数字温度传感器测量外界温度;
(4)实时时钟模块:选用Dallas公司推出的一种高性能、低功耗的实时时钟芯片DS1302进行时间的计量;
(5)电源电路模块:电源电路模块有12 V,5 V和3.3 V三个部分,12 V供步进电机使用,5 V供AT89S52单片机使用,3.3 V供MSP430和其他芯片使用。系统用12 V直流电源供电,利用AMS117-5.0及AMS117-3.3稳压芯片把电源由12 V电压转换为5 V和3.3 V电压供各个功能模块使用;
(6)液晶显示模块:选用12864液晶模块显示光强、温度、时间等状态;
(7)串行通信模块:选用MAX232实现单片机和上位机之间的异步串口通信,传输数据;
(8)键盘控制模块:利用MSP430的P2端口中断实现键盘的操作,控制系统,调整时间。
2 软件设计
2.1 系统工作流程
由于所处地理位置不同(南北半球、海拔高度)和时间季节的不同,并且系统的机械装置是随意放置的,所以系统启动后硅太阳能电池板的初始基准角度是不正确的。系统上电开机后,首先系统会自动检测,调整基本的方向角和太阳能电池板的俯仰角,再进一步的微调使太阳光线垂直入射太阳能电池板,从而以此点作为基准点进入工作模式。第一次上电运行系统会要求输入时钟时间,然后系统就进入了正常工作模式。
实时时钟开始正常运行,每隔1 s会对DS1302读取一次,作为太阳能电池板调整的时钟时间基准;系统用AD12模数转换器对采样通道进行采样、转换,判断天气的晴阴和充电电池的电量状态;同时会根据时钟时间和和光照强度对太阳能电池板角度进行调整,使太阳光线始终垂直入射太阳能电池板,以实现光伏发电的最大化;系统上电以后液晶显示模块利用TimerA定时器每秒10次地刷新屏幕,显示时间日期、天气温度、光照强度、充电状态等信息;而按键的动作是通过MSP430单片机P2端口下降沿的中断实现的,完成液晶屏幕的切换和时间的调整等;另外系统会通过无线射频装置发送数据到接收端,并上传到上位机,实现远程实时监控。图6是系统工作的流程图,分为发送和接收两部分流程。

2.2 太阳能电池板角度调整
系统综合光电追踪和视日运动轨迹两种追踪方式的优点,从外部时钟芯片中读取时间,根据时间和太阳角度的关系,每隔一段时间进行一次角度的调整,调整到预定的方位角和俯仰角(通常是稍大于准确角度);在运动过程中,AD12会记录各个位置的光强值,产生光照强度系列值,然后控制步进机再把太阳能电池板精确调整到光照强度最强的位置上。太阳能电池板角度调整的流程图如图7所示,当时间在MIN_TIME和MAX_TIME之间时,每隔一段时间MINUTE_PER_RUN进行一次角度调整,先是根据时钟时间调整到预定位置,再是根据光电检测强度精确调整到光照最强位置(时间上限、下限和每隔多少分钟检测一次太阳高度可软件设定,系统默认MIN_TIME=6,MAX_TIME=18,MINUTE_PER_RUN=15,即时间在6:00到18:00之间,每隔15 min调整一次)。

当时间不在MIN_TIME和MAX_TIME之间时,即时间已经到了晚上,系统要做的就是把机械装置调整到初始位置,也就是第二天的开始位置,然后系统就进入待机状态,机械装置不在运动,直至第二天的MIN_TIME以后。
3 实验
太阳能追踪采集系统的设计实物模型如图8所示,分别为无线数据接收端、无线数据发送及控制端和机械装置端。

经过实际测试,系统能够正确驱动机械装置,能在MIN_TIME到MAX_TIME范围内,而且每隔一段时间MINUTE_PER_RUN太阳能电池板调整一次,实现了对太阳进行精确、快速追踪;太阳能电池板工作正常,可以有效地为锂电池充电;实现了液晶显示和复杂的键盘动作相协调,可以图形化观测电池电量,为系统设置时钟时间;光电检测、温度、实时时钟、无线射频等模块能够正常运行,通过无线传输数据,单片机和上位机的串口通信,能够远程监控。系统达到且超出了预期目标,满足设计要求,能够稳定可靠的运行,实现了太阳能的自动追踪采集控制。
4 结语
太阳能追踪采集系统利用步进电机双轴驱动,通过对机械装置端进行水平、俯仰两个自由度的控制,先是根据时钟时间调整太阳能电池板到预定位置,再是根据光电检测精确调整到光照最强处,能实现对太阳的全天候追踪及精确、快速定位,使追踪太阳更加稳定可靠。通过液晶显示和无线射频传输,既可现场监控又可远程监控太阳光照强度、天气温度、充电池电量状态和时钟时间等信息。通过键盘的动作则能完成液晶屏幕的切换、时间的调整以及图形化显示,而且将以太阳能电池板充电的锂电池作为实时时钟DS1302的备用电池,可在系统断电的情况下使实时时钟依然正常工作,从而保持准确的时钟时间。如果研究并设计电源管理模块,把系统的外部供电电源、给太阳能充电的电源、电机使用的电源和其他芯片使用的电源统一整合,分别管理,就可以实现系统的太阳能自供电
上一篇:基于单片机的LED路灯模拟控制系统的设计与实现
下一篇:基于单片机的音乐播放器的仿真与制作
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 LM101AJ14/883C
LM101AJ14/883C
设计资源 培训 开发板 精华推荐
- 【下载】LAT1416 借助 DMA 将内存图像旋转 90 度
- 【下载】LAT1426 IAR flashloader 下载算法制作介绍
- 【下载】LAT1431 STM32 AI Model Zoo 的安装及实例介绍
- 【下载】LAT1435 使用 GPDMA 进行 SPI LCD 整屏传输
- 【下载】LAT1438 AFCI 上位机用户手册
- 【下载】LAT1440 如何在特定串口工具上以不同颜色显示信息












 京公网安备 11010802033920号
京公网安备 11010802033920号