在现代机器人设计中,头部、颈部、四肢的任何活动都需要各种各样电机的支持,如传统的旋转电机、步进电机、直线电机和其它特殊电机,但这些电机的驱动和控制要求各有不同,如何实现各种电机的精确控制解决方案?如何以最低的功耗实现对它们的控制?常常对设计师来说是一大挑战。本文将详细地讨论高压电机控制系统的各核心子系统在具体实现时应注意哪些问题。
高压交流(HVAC)电机、工业逆变器或高压永磁无刷电机是高电压系统的几个例子,它们典型地按他们的马力进行分类。虽然仍是最常见的,但其他类型电机也已经出现,如直线电机和内嵌各种激励器实现的齿轮头电机。数字电机控制解决方案允许精确地控制这些机械驱动机构的位置、速度和转矩。在这类大型机械驱动机构中的MOSFET通常容量超过600V。
例如,TI有栅极驱动解决方案TPS2829,一个同相高速MOSFET驱动器。当结合反馈环路中的TLV3501比较器时,这些系统中的栅极就可以进行数字控制。另外,TI的MOSFET驱动器(如UCC37321或UCC37323)可以直接驱动小马达或驱动功率器件,如MOSFET或IGBT。
高压电机控制系统的主要设计考虑因素
高压电机控制系统的核心子系统包括:控制器、隔离、控制器接口和运动反馈。
控制器:TI还提供一系列的控制处理器解决方案,从超低功耗MSP430微控制器到TMS470基于ARM7的处理器和C2000数字信号控制器(DSC)。恰当的控制器可以优化电机驱动效率,提高可靠性和降低整体系统成本。C2000控制器的32位DSP水平的性能和针对电机控制优化的片上外设使用户可以轻松地实现先进的算法,如三相马达的无传感器矢量控制。C2000系列控制器(从低成本F28016到业界首个浮点DSC TMS320F28335)都保持软件兼容。
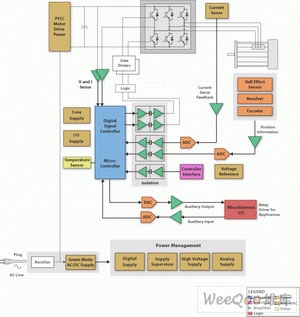
隔离:TI的数字隔离器具有逻辑输入和输出缓冲器,它们采用二氧化硅进行隔离,提供4kV的隔离能力。与隔离电源结合使用时,这些器件可以阻隔高电压,隔离地,并防止噪声电流进入本地地,以及干扰或损坏敏感电路。
控制器接口:RS-232或RS-422对许多系统而言足够用了。RS-485信令可能会捆绑一些协议,如Profibus、Interbus、Modbus或BACnet,每个针对最终用户的特定需求。有时,控制器局域网(CAN)或EtherNet/IP(工业协议)优先用于满足联网要求。M-LVDS是可以提供更低功耗的一种替代选择。
使用外部电路的运动反馈:隔离的Delta-Sigma调制器(AMC1203/AMC1210)非常适合用于分流测量,以拉平毛刺和增加电流反馈分辨率。此外,INA19x(x=3到8)和INA20x(x=1至9)为低端和高端电流分流监测提供很宽的共模电压。
霍尔效应或磁传感器通常在测量超过10A的电流时更有效率,而且他们可固有地提供隔离能力。ADS1204、ADS1205和ADS1208是3个推荐器件。为了将±10V(20Vpp)信号连接到采用3.3V或5V电源的ADC上,可使用一个INA159电平差异放大器。像ADS7861/ADS7864或ADS8361/ADS8364的ADC可提供4通道或6声道的同时电流取样。
引用地址:
高压电机控制系统的设计考量
推荐阅读最新更新时间:2024-03-16 13:24
基于模型的高级电机控制系统设计
最近几十年来,借助高级处理器功能来简化设计一直都是广泛讨论的话题。如今,设计灵活性进一步提高,使工程师能够采用标准的MATLAB® 和 Simulink®模型设计来优化电机控制系统,并缩短整体设计时间。此外,设计工程师还能够重复使用仿真模型,确保系统在终端市场应用中具有正确的功能和所需性能。
图 1 – 设计发展史与设计能力
基于模型的设计 (MBD) 经过数十年的探讨,直到最近几年才发展为完整的设计流程:从模型创建到完整实现。在 1970 年代,仿真可采用模拟计算平台,但是控制硬件却只能借助晶体管实现。2000 年代仿真工具的发展迎来了图形化控制原理图输入工具和控制设计工具,大大简化了复杂的控制设计和评估任务。但是
[嵌入式]
MSP430矩阵式按钮驱动程序
#include msp430x14x.h unsigned char LineScan ={0xef,0xdf,0xbf,0x7f}; //列值列举 void ADD() { P4OUT+=1; } void SUB() { P4OUT-=1; } unsigned int key_check(void) //检测是否有按键按下 { unsigned char temp; P1DIR=0xf0; //定义P1.4~P1.7为输出 temp=P1IN & 0x0f; if(temp!=0x0f) return 1; else return 0; } unsig
[单片机]
激光焊接加工机床的四轴步进电机控制系统设计
近年来,国内外 激光加工技术 的发展很快,根据资料显示:仅1996年1月至2002年10月美国有关 激光加工 的专利就有9 432件,雨我国有关专利只有294件。这说明我国的 激光加工技术 及其应用的开发还需要进一步地提高。 激光加工 技术在加工质量、生产效率及经济性方面的优势明显。因此在很多发达国家激光加工已经成为一种定型的加工技术,相应地,激光加工设备 制造业 也迅猛地发展起来。我国的激光加工技术急需要有更大的突破与更大的发展,这就给国内从事激光加工技术设备研发的相关组织机构带来了新的机遇和挑战。激光 焊接技术 是激光加工技术中最为活跃的技术。其原理为:激光焊接是将高强度的激光束辐射至金属表面,通过激光与金属的相互作用,金
[嵌入式]
基于MSP430F149的数据转发器设计
摘要:以MSP430F149单片机为核心,设计一种双串行通信的电能表自动抄收系统的转发器,给出转发器的硬件结构框架与软件设计方案。转发器通过三种通信方式实现主机与电表抄表器的数据通信。
关键词:转发器 串行通信 MSP430 微控制器
概述
目前大量存在的人工抄表的方法已远不能适应现代化管理的需要,并由此带来的线损率的增高也必然影响电力行业的发展。线损率较高的主要原因之一就是抄表、计算和管理手段的落后,管理损耗增大。如果采用电能表自动抄收系统,不仅可以大大提高电网运行的可靠性,而且可以充分利用现有设备的能力,降低劳动强度。该系统主要由电表抄表器(数据采集)、数据转发器(数据传输)和主机(数据处理)三大部分组成。本文主要设计
[单片机]
MSP430单片机输入/输出模块—通用I/O端口GPIO—LED&按键
一、原理图 ●MSP430F5529 LaunchPad实验板上仅有的两个独立按键和LED。 二、I/O端口常用操作C语言描述及常用C语言解析 1、MSP430头文件中的标准位 在每一个具体的430型号单片机的头文件中都可以找到(如msp430F5529.h)。 /************************************************************ * STANDARD BITS ************************************************************/ #define BIT0 (0x0001) #define B
[单片机]

MSP430F42X系列单片机16位ADC通用程序库
这个msp430单片机的16位ADC库文件的调用方法可先下载完整代码然后找到(例4.1.6)这一节,里面有调用方法 ADC16.c文件: /* MSP430F42X系列单片机16位ADC通用程序库 说明:该驱动程序库包含了常用的16位ADC操作与控制功能函数,如选择通道、设置信号放大倍数、设置数据格式、基准源输出开关等,以及常用采样函数,包括单通道采样、平均采样、多通道同时采样等。可以作为各种程序的底层驱动使用。 要使用该库函数,需要将本文件(ADC16.c)添加进工程,并在需要调用ADC函数的文件开头处包含 ADC16.h */ // MSP430FE425 // +------
[单片机]
MSP430平台下实现Si4432的收发数据
Si4432芯片是Silicon Labs公司推出集成度、低功耗、多频段的EZRadioPRO系列无线收发芯片。可以工作在433M免费频段。早期生产的V2版本的不太稳定,经过SI公司改进后,B1版本的性能比较稳定,最大功率可以到20dBm(100mw),接收灵敏度可以到-121dbm,工作电压为1.9~3.6 V,20引脚QFN封装(4 mm×4 mm),可工作在315/433/868/915 MHz四个频段;内部集成分集式天线、功率放大器、唤醒定时器、数字调制解调器、64字节的发送和接收数据FIFO,以及可配置的GPIO等。因其发射功率大,接收灵敏度高,可以传输到上千米的距离,素有 穿墙王 之称。他与NRF905、CC1101无
[单片机]
详解TI MSP430 FRAM MCU惊呆小伙伴们的“杀手锏”
针对智能水表、电表、遥控器等需要长时间使用的应用,任何MCU厂商都会以“低功耗”来大做文章,8 bit、16 bit和新晋的32 bit MCU都在分食低功耗应用市场,并且厮杀得越来越激烈。德州仪器(TI)MSP430一直是业界的明星产品,MSP430 FRAM系列MCU问世之后,更是频频打破低功耗的极限,同时也成为竞争对手争先对比和“攻击”的对象。我们不要再听厂商们“王婆卖瓜自卖自夸”,先来看看权威第三方机构的验证结果。 嵌入式微处理器基准评测协会(EEMBC),基本上涵盖80%~90%的MCU的厂家都是其成员,他们一起做了评估,此次评估囊括了8 bit、16 bit和32 bit MCU,评估的标准值称为ULP -MA
[嵌入式]

 汽车基本电路和电子器件检测与修复
汽车基本电路和电子器件检测与修复












 京公网安备 11010802033920号
京公网安备 11010802033920号