首先是在看一个喇叭电路时,通过单片机的一个IO口来控制PNP管的导通与否,进而控制这个喇叭是否工作,下面介绍NPN、PNP管的相关知识:
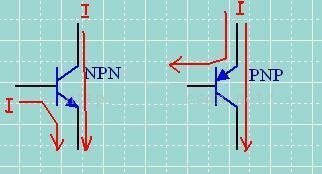
NPN和PNP主要就是电流方向和电压正负不同,说得“专业”一点,就是“极性”问题。
NPN 是用 B→E 的电流(IB)控制 C→E 的电流(IC),E极电位最低,且正常放大时通常C极电位最高,即 VC > VB > VE
PNP 是用 E→B 的电流(IB)控制 E→C 的电流(IC),E极电位最高,且正常放大时通常C极电位最低,即 VC < VB < VE
1.如果输入一个高电平,而输出需要一个低电平时,首选择npn。
2.如果输入一个低电平,而输出需要一个低电平时,首选择pnp。
3.如果输入一个低电平,而输出需要一个高电平时,首选择npn。
4.如果输入一个高电平,而输出需要一个高电平时,首选择pnp。
NPN和PNP型传感器的区别就是在与输出的电平不同,NPN输出低电平,PNP反之。
N是英文单词native的缩写,P是positive的缩写,分别代表正、负。
N材料中导电的东西是电子、P材料中导电的是空穴。
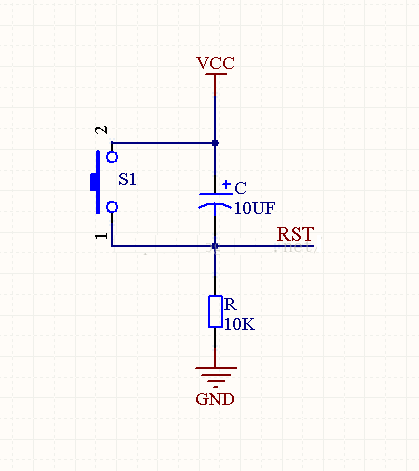
复位电路的工作原理
在书本上有介绍,51单片机要复位只需要在第9引脚接个高电平持续2us就可以实现,那这个过程是如何实现的呢?在单片机系统中,系统上电启动的时候复位一次,当按键按下的时候系统再次复位,如果释放后再按下,系统还会复位。所以可以通过按键的断开和闭合在运行的系统中控制其复位。
开机的时候为什么为复位
在电路图中,电容的的大小是10uf,电阻的大小是10k。所以根据公式,可以算出电容充电到电源电压的0.7倍(单片机的电源是5V,所以充电到0.7倍即为3.5V),需要的时间是10K*10UF=0.1S。也就是说在电脑启动的0.1S内,电容两端的电压时在0~3.5V增加。这个时候10K电阻两端的电压为从5~1.5V减少(串联电路各处电压之和为总电压)。所以在0.1S内,RST引脚所接收到的电压是5V~1.5V。在5V正常工作的51单片机中小于1.5V的电压信号为低电平信号,而大于1.5V的电压信号为高电平信号。所以在开机0.1S内,单片机系统自动复位(RST引脚接收到的高电平信号时间为0.1S左右)。
按键按下的时候为什么会复位
在单片机启动0.1S后,电容C两端的电压持续充电为5V,这是时候10K电阻两端的电压接近于0V,RST处于低电平所以系统正常工作。当按键按下的时候,开关导通,这个时候电容两端形成了一个回路,电容被短路,所以在按键按下的这个过程中,电容开始释放之前充的电量。随着时间的推移,电容的电压在0.1S内,从5V释放到变为了1.5V,甚至更小。根据串联电路电压为各处之和,这个时候10K电阻两端的电压为3.5V,甚至更大,所以RST引脚又接收到高电平。单片机系统自动复位。
总结:
1、复位电路的原理是单片机RST引脚接收到2US以上的电平信号,只要保证电容的充放电时间大于2US,即可实现复位,所以电路中的电容值是可以改变的。
2、按键按下系统复位,是电容处于一个短路电路中,释放了所有的电能,电阻两端的电压增加引起的。
关键字:单片机 常见电路
引用地址:
单片机中的一些常见电路
推荐阅读最新更新时间:2024-03-16 16:17
国民技术与IAR展开生态合作,IAR集成开发环境全面支持N32系列MCU
IAR Embedded Workbench for Arm集成开发环境现已全面支持基于国民技术N32 G/L/WB/A等工业与车规MCU的应用开发 中国上海——2023年6月13日——嵌入式开发软件和服务的全球领导者IAR近日发布的集成开发环境IAR Embedded Workbench for Arm9.40版, 已全面支持国民技术N32系列产品 ,其中包括基于M4内核的N32G452、N32G455、N32G457、N32G4FR、N32WB452、N32G432、N32G435、N32L436、N32L406、N32G430、N32G401系列MCU和N32A455系列车规MCU,以及基于M0内核的N32G031、N
[嵌入式]

8051单片机指令系统剖析详解
MCS- 51系列单片机的指令系统是一种简明高效的指令系统,其基本指令共有111条,其中单字节指令49条,双字节指令4'5条,三字节指令17条。如果按功能可以讲这些指令分为五类:数据传送类(29条)、算术操作类(24条)、逻辑操作类(24条)、控制转移类(17条)以及位变量操作类(17条)。对于反向设计而言,我们关心的不是它的各种具体指令的多少而是指令的寻址方式。所谓的寻址方式就是寻找确定参与操作的数的真正地址。MCS-51系列单片机的111条指令一共只采用了5种寻址方式。5种寻址方式以及它们的寻址空间如表1所示。 1.寄存器寻址 寄存器寻址方式可用于访问选定寄存器区的8个工作寄存器RO-R7。由指令操作码的低三位指示所用
[单片机]
单片机访问外部RAM原程序
//-----------------------定义寻址的基址-------------------------------------------------------- #define base_Adr 0x060000 //-----------------------定义地址指针,指向基址-------------------------------------------------------- unsigned char xdata *ORAM_base_Adr = base_Adr; //---------------------------------------------------------------
[单片机]
AVR单片机利用T1产生50HZ占空比可调的正弦波
代码如下 #include avr/interrupt.h int main(void) { DDRA=0XFF; DDRB=0XFF; DDRD=0X00; PORTD=0XFF; PORTA=0XFF; PORTB=0X00; TIMSK=0X00; TCNT1H=0x00; //计数器清零 TCNT1L=0x00; TCCR1A=0xa8; TCCR1B=0x14; //256 分频 TCCR1C=0x00; ICR1=0X0140; OCR1A=0x00A0; //OC1A 输出 50%占空比 while(1) { if(PIND
[单片机]
51单片机入门 - 定时/计数器原理及结构(T0和T1)
定时/计数器结构(T0和T1) 16位 寄存器 T0、T1分别由TH0、TL0和TH1、TL1四个8位计数器组成 定时器的区别: T0可分成2个独立的8位定时器,而定时器1则不能; T1可作为串口的波特率发生器,而定时器0则不能。 工作原理 注:T0或T1都不能同时既做定时器也做计数器 补充: 计数器工作原理: 用作计数器时,对T0或T1引脚的外部脉冲计数,如果前一个机器周期采样值为1,后一个机器周期采样值为0 ,则说明有一个脉冲,计数器加1。 在每个机器周期的S5P2期间采样引脚输入电平。新的计数初值于下一个机器周期的S3P1期间装入计数器。 此种方式需要两个机器周期来检测一个1- 0负跳变信号,因此最高的计
[单片机]
飞思卡尔单片机DZ60---中央对齐PWM
#include hidef.h /* for EnableInterrupts macro */ #include derivative.h /* include peripheral declarations */ //中央对齐 PWM实验,TPM1通道0和1对应的管脚为PTD3,PTD4分别接LED3,LED4 //实验现象LED3,LED4闪烁的周期都为0.5秒,闪烁的时长不同。 /*************************************************************/ /* 初始化总线时钟PEE模式 */ /* 外部晶振频率为4M
[单片机]
如何使用STM8S单片机的多通道AD转换
STM8S单片机的A/D结构简介: 具有ADC1 ADC2(部分型号没有ADC2)最多提供16个转换通道,A/D转换的各个通道可以执行单次和连续的转换模式。 1.电压0到Vdda; 2.在64和80引脚封装的有独立的Vref,其他的封装形式Vref连接在Vdda 3.续转换形式; 4.时间14个时钟周期; 5.10位转换精度; 6.产生转换结束中断; ADC1结构图 编程中注意的知识点: 过置位ADC_CR1寄存器的 ADON位来开启ADC。当首次置位ADON位时,ADC从低功耗模式唤醒。为了启动转换必须第二次使用写指令来置ADC_CR1寄存器的ADON 位。在转换结束时ADC会保持在上电状态,用
[单片机]
单片机智能频率信号装置
0 概 述 在电力系统发电机组的调试试验工作及其它工程实践中,特别是旋转机械的调试工作中,广泛使用低频信号发生源。在以往的实践中,大量使用的为由晶体管组成的低频信号发生器或由电子管组成的工频信号源;这些仪器体大笨重,携带困难;同时模拟器件随时间和温度的漂移使输出信号不稳定,给调试工作带来了极大的不便。此外,在旋转机械的起动、停止和试运转过程中,还需要测量其转速(频率)及记录其变化过程。本文介绍一种由单片机组成的同时兼具信号发生和频率测量的智能信号装置,它充分发挥单片机智能控制的特长,具有体积小、重量轻、能发生超低频信号、可编程模拟旋转机械的动态过程等一系列优点。 1 系统组成 智能信号装置以8031为主芯片构成
[应用]



 汽车电子产品工艺
汽车电子产品工艺 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练












 京公网安备 11010802033920号
京公网安备 11010802033920号