1 前言
当bxCAN接收到报文,经过过滤器过滤后,会将报文存储到FIFO中,由http://blog.csdn.net/flydream0/article/details/8148791一文中可知,每个过滤器组都会关联一个FIFO,由此可见,当接收到的报文通过过滤器后会被存储到此过滤器组关联的FIFO中(STM32共两个接收FIFO)。这个FIFO为3级邮箱深度,且完全由硬件来管理,从而节省了CPU的处理负荷,简化了软件并保证了数据的一致性。应用程序只能通过读取FIFO输出邮箱,来读取FIFO中最先收到的报文。
2 什么是FIFO输出邮箱?
在回答这个问题之前,首先要知道一些内容,STM32的bxCAN模式共有两个接收FIFO,其次,每个接收FIFO有3级邮箱深度,意思就是说由三个邮箱组成,你暂且可以将这三个邮箱一起看成一个具体三个成员的消息队列,那么,你肯定会问,这个消息队列哪个是队首,哪个是队尾(假设消息从队首存入,从队尾取出)?在这里,这个FIFO输出邮箱就相当于这个队尾的意思,你可以将它看成是一个指向队尾的指针。那么三个邮箱哪个是队尾呢?显而易见,这就取决了当时接收到的消息了。
3 有效报文的定义
根据CAN协议,当报文被正确接收(直到EOF域的最后一位都没有错误),且通过了标识符过滤,那么该报文被认为是有效报文(参考:http://blog.csdn.net/flydream0/article/details/8148791)。
4 FIFO的状态
FIFO共有五个状态:空状态,挂号1状态,挂号2状态,挂号3状态,溢出状态。如下图所示:

图1
如上图,FIFO的状态是通过两个标志(FMP,FOVR)来体现的,FMP占两个位,用来标志当前报文所存储的邮箱,FOVR用以标志FIFO是否溢出。这两个标志处于FIFO寄存器(CAN_RFxR x=0..1)中。
4.1 FIFO的状态变化分析
由图1可知,在初始化状态时,FIFO是处于空状态的,当接收到一个报文时,这个报文存储到FIFO内部的邮箱中,此时,FIFO的状态变成挂号1状态,如果应用程序取走这个消息,则FIFO恢复空状态。
现在假设FIFO处于挂号1状态,即已接收到一个报文,且应用程序不没来得及取走接收到的报文,此时若再次接收到一个报文,那么FIFO将变成挂号2状态,以此类推,由于FIFO共有3个邮箱,只能缓存3个报文,因此,当接收到3个报文(假设期间应用程序从未取走任何报文)时,此时FIFO已满,若再来一个报文时,已无法再存储,此时FIFO将变成溢出状态。
4.2 FIFO溢出时的策略
STM32有两种策略来处理当FIFO溢出时的报文:
一:当FIFO溢出时,首先抛弃FIFO内最老的报文,然后再存入新接收到的报文,即滚动接收模式。
二:当FIFO溢出时,抛弃新接收到的报文,即FIFO锁定模式。
如何采用以上何种策略,取决于具体应用需求。如何设置?CAN主控制器寄存器(CAN_MCR)设置RFLM位为0,则为FIFO滚动接收模式,设为1,则为FIFO锁定模式。
5 与CAN接收相关的中断
STM32中与CAN接收相关的中断有三个:
接收中断:每当bxCAN接收到一个报文时产生一个中断。
FIFO满中断:当FIFO满时,即存储了3个报文时产生的中断。
FIFO溢出中断:当FIFO溢出时产生此中断。
需要注意的是,并不是以上所有中断就一定会产生,这取决于中断允许寄存器(CAN_IER)如何配置,关于中断相关内容,详情请关注后续中断介绍博文。
6 FIFO的构成
前面已经说过,STM32共有两个接收FIFO,每个FIFO由三个邮箱构成,那么每个邮箱又是如何的呢?
每个邮箱是由四个寄存器组成,这四个寄存器分别是:接收FIFO邮箱标识符寄存器(CAN_RIxR x=0..1),接收邮箱数据长度和时间戳寄存器(CAN_RDTxR x=0..1),接收FIFO邮箱低字节寄存器(CAN_RDLxR x=0..1),接收FIFO邮箱高字节寄存器(CAN_RDHxR x=0..1)。
6.1 标识符寄存器(CAN_RIxR)(x=0..1)
地址偏移量:0x1B0,0x1C0
复位值:未定义位
注: 所有接收邮箱寄存器都是只读的。

图2
由上图可知,一个CAN ID寄存器由11位标准id+18位扩展id+IDE(扩展标识)+RTR(远程帧标志)组成。
| 位31:21 | STID[10:0]: 标准标识符 扩展身份标识的高字节。 |
| 位20:3 | EXID[17:0]: 扩展标识符 扩展身份标识的低字节。 |
| 位2 | IDE: 标识符选择 该位决定接收邮箱中报文使用的标识符类型 0: 使用标准标识符; 1: 使用扩展标识符。 |
| 位1 | RTR: 远程发送请求 0: 数据帧; 1: 远程帧。 |
| 位0 | 保留位。 |
6.2 数据长度和时间戳寄存器 (CAN_RDTxR) (x=0..1)
地址偏移量:0x1B4,0x1C4
复位值:未定义位
注: 所有接收邮箱寄存器都是只读的。

图3
各位的定义如下:
| 位31:16 | TIME[15:0]: 报文时间戳 该域包含了,在接收该报文SOF的时刻,16位定时器的值。 |
| 位15:8 | FMI[15:0]: 过滤器匹配序号 这里是存在邮箱中的信息传送的过滤器序号。关于标识符过滤的细节,请参考21.4.4中有关过滤器匹配序号。 |
| 位7:4 | 保留位,硬件强制为0。 |
| 位3:0 | DLC[15:0]: 接收数据长度 该域表明接收数据帧的数据长度(0~8)。对于远程帧,数据长度DLC恒为0。 |
这里需求注意的是FMI,还记得之前一篇介绍过滤器组的文章吗:http://blog.csdn.net/flydream0/article/details/8148791,当接收到一个报文时,这个报文通过某一个过滤器时,会将此过滤器对应的序号,即过滤器匹配序号保存到关联的接收FIFO中,具体来说,应该是保留到关联的FIFO中的邮箱的数据长度和时间戳寄存器的FMI位。这下明白了吧。
6.3 接收FIFO邮箱低字节数据寄存器 (CAN_RDLxR) (x=0..1)
地址偏移量:0x1B8,0x1C8
复位值:未定义位
注: 所有接收邮箱寄存器都是只读的。
接收到的报文的数据用两个寄存器存储,分别存储高四个字节和低四个字节。这里是指低四个字节。
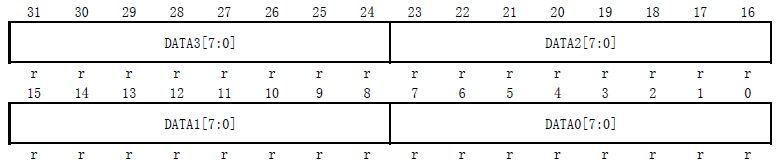
图4
| 位31:24 | DATA3[7:0] : 字节3 报文的数据字节3。 |
| 位23:16 | DATA2[7:0] : 字节2 报文的数据字节2。 |
| 位15:8 | DATA1[7:0] : 字节1 报文的数据字节1。 |
| 位7:0 | DATA0[7:0] : 字节0 报文的数据字节0。 报文包含0到8个字节数据,且从字节0开始。 |
6.4 接收FIFO邮箱高字节数据寄存器 (CAN_RDHxR) (x=0..1)
地址偏移量:0x1BC,0x1CC
复位值:未定义位
注: 所有接收邮箱寄存器都是只读的。
含义如6.3节,这时是指接收报文的数据的高四个字节。
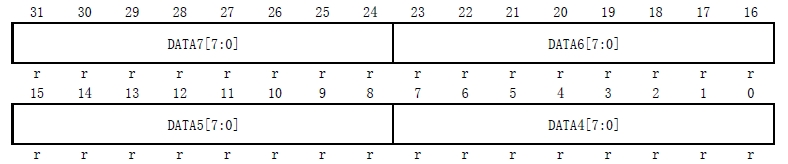
图5
| 位31:24 | DATA7[7:0] : 字节7 报文的数据字节7 注: 如果CAN_MCR寄存器的TTCM位为1,且该邮箱的TGT位也为1,那么DATA7和DATA6将被TIME时间戳代替。 |
| 位23:16 | DATA6[7:0] : 字节6 报文的数据字节6。 |
| 位15:8 | DATA5[7:0] : 字节5 报文的数据字节5。 |
| 位7:0 | DATA4[7:0] : 字节4 报文的数据字节4。 |
7 CAN的接收FIFO寄存器(CAN_RFxR x=0..1)介绍
前面已经介绍了接收FIFO中的邮箱的组成(每个邮箱由四个寄存器组成),接收FIFO有了三个邮箱所包含的寄存器还不够,接收FIFO还应该由一个专门的寄存器来管理,来指示接收FIFO的状态和操作FIFO(如释放)。那么这个寄存器就叫接收FIFO寄存器(CAN_RFxR x=0..1)。
如下图:
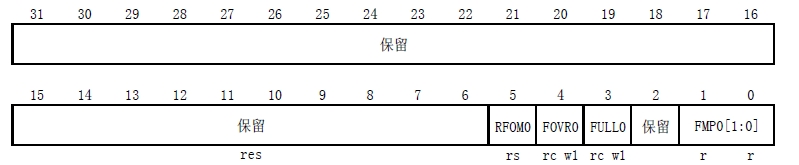
图6
各位如下定义:
| 位31:6 | 保留位,硬件强制为0 |
| 位5 | RFOM0: 释放接收FIFO 0输出邮箱 软件通过对该位置1来释放接收FIFO的输出邮箱。如果接收FIFO为空,那么对该位置1没有任何效果,即只有当FIFO中有报文时对该位置1才有意义。如果FIFO中有2个以上的报文,由于FIFO的特点,软件为了访问第2个报文,就需要释放输出邮箱才行。 当输出邮箱被释放时,硬件对该位清0。 |
| 位4 | FOVR0: FIFO 0 溢出 当FIFO 0已满,又收到新的报文且报文符合过滤条件,硬件对该位置1。 该位由软件清0。 |
| 位3 | FULL0: FIFO 0 满 当有3个报文被存入FIFO 0时,硬件对该位置1。 该位由软件清0。 |
| 位2 | 保留位,硬件强制其值为0 |
| 位1:0 | FMP0[1:0]: FIFO 0 报文数目 FIFO 0报文数目这2位反映了当前接收FIFO 0中存放的报文数目。 每当1个新的报文被存入接收FIFO 0,硬件就对FMP0加1。 每当软件对RFOM0位写1来释放输出邮箱,FMP0就被减1,直到其为0。 |
需要注意到的是,接收FIFO的溢出模式并非在此寄存器设置,而是CAN主控制器(CAN_MCR的RFLM位)设置,见4.2节。估计是STM32并不想每个FIFO各自一种溢出模式,而只能共用一种溢出模式。
8 STM32固件库的接收接口
STM32固件库中对应的接收接口为:
/**
* @brief Receives a correct CAN frame.
* @param CANx: where x can be 1 or 2 to select the CAN peripheral.
* @param FIFONumber: Receive FIFO number, CAN_FIFO0 or CAN_FIFO1.
* @param RxMessage: pointer to a structure receive frame which contains CAN Id,
* CAN DLC, CAN data and FMI number.
* @retval None
*/
void CAN_Receive(CAN_TypeDef* CANx, uint8_t FIFONumber, CanRxMsg* RxMessage);
获取当前接收FIFO中挂号的报文个数:
/**
* @brief Returns the number of pending received messages.
* @param CANx: where x can be 1 or 2 to select the CAN peripheral.
* @param FIFONumber: Receive FIFO number, CAN_FIFO0 or CAN_FIFO1.
* @retval NbMessage : which is the number of pending message.
*/
uint8_t CAN_MessagePending(CAN_TypeDef* CANx, uint8_t FIFONumber);
上一篇:STM32之CAN---配置波特率
下一篇:无法使用内置Bootloader的DFU方式进行固件升级
推荐阅读最新更新时间:2024-03-16 15:27

 软硬件融合 (黄朝波 著)
软硬件融合 (黄朝波 著) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号