对GPIO进行未绑定,好处:加快对位操作的速度。
1、位绑定公式(操作不同地址区域的位,用下面不同的公式)
2、下面以GPIOA端口的配置进行讲解:

3、对少量位进行绑定的程序例举:
/**************************************************************************************************
* 硬件平台:STM32F103VC
* 学习重点:GPIOx的位绑定
* 实现功能:对于GPIOA端口的第八位输出 跟随 高八位的输入
**************************************************************************************************/
/*=============================================================================
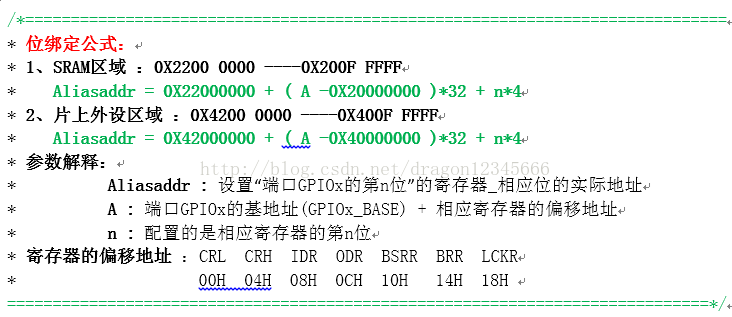
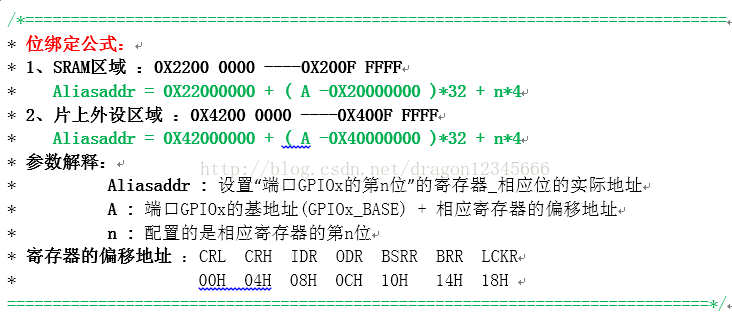
* 位绑定公式:
* 1、SRAM区域 :0X2200 0000 ----0X200F FFFF
* Aliasaddr = 0X22000000 + ( A -0X20000000 )*32 + n*4
* 2、片上外设区域 :0X4200 0000 ----0X400F FFFF
* Aliasaddr = 0X42000000 + ( A -0X40000000 )*32 + n*4
* 参数解释:
* Aliasaddr : 设置“端口GPIOx的第n位”的寄存器_相应位的实际地址
* A : 端口GPIOx的基地址(GPIOx_BASE) + 相应寄存器的偏移地址
* n : 配置的是相应寄存器的第n位
* 寄存器的偏移地址 :CRL CRH IDR ODR BSRR BRR LCKR
* 00H 04H 08H 0CH 10H 14H 18H
=============================================================================*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_lib.h" //包含了所有的头文件 它是唯一一个用户需要包括在自己应用中的文件,起到应用和库之间界面的作用。
#include "stm32f10x_map.h"
/*-----------------------------------------------------------------------------------------------------------
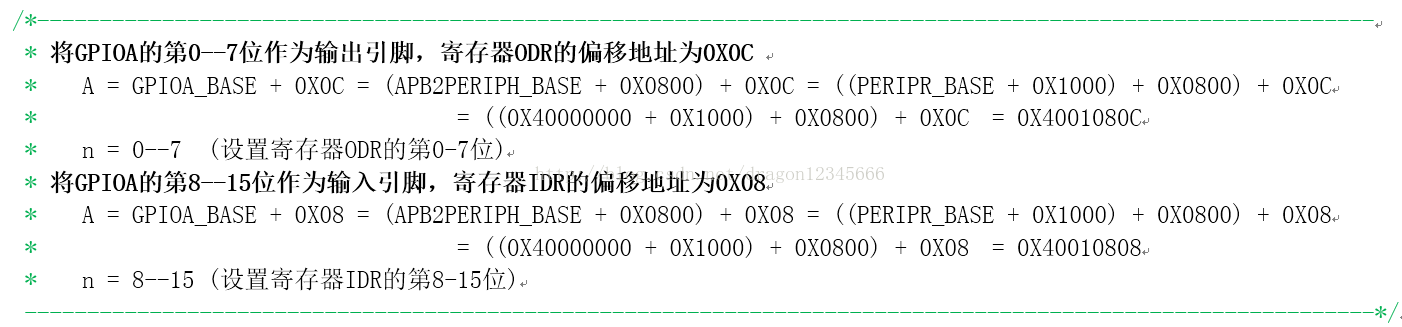
*将GPIOA的第3位作为输出引脚,寄存器ODR的偏移地址为0X0C
* A = GPIOA_BASE + 0X0C = (APB2PERIPH_BASE + 0X0800) + 0X0C = ((PERIPR_BASE + 0X1000) + 0X0800) + 0X0C
* = ((0X40000000 + 0X1000) + 0X0800) + 0X0C = 0X4001080C
* n = 3 (设置寄存器ODR的第3位)
* 将GPIOA的第11位作为输入引脚,寄存器IDR的偏移地址为0X08
* A = GPIOA_BASE + 0X08 = (APB2PERIPH_BASE + 0X0800) + 0X08 = ((PERIPR_BASE + 0X1000) + 0X0800) + 0X08
* = ((0X40000000 + 0X1000) + 0X0800) + 0X08 = 0X40010808
* n = 11 (设置寄存器IDR的第11位)
------------------------------------------------------------------------------------------------------------*/
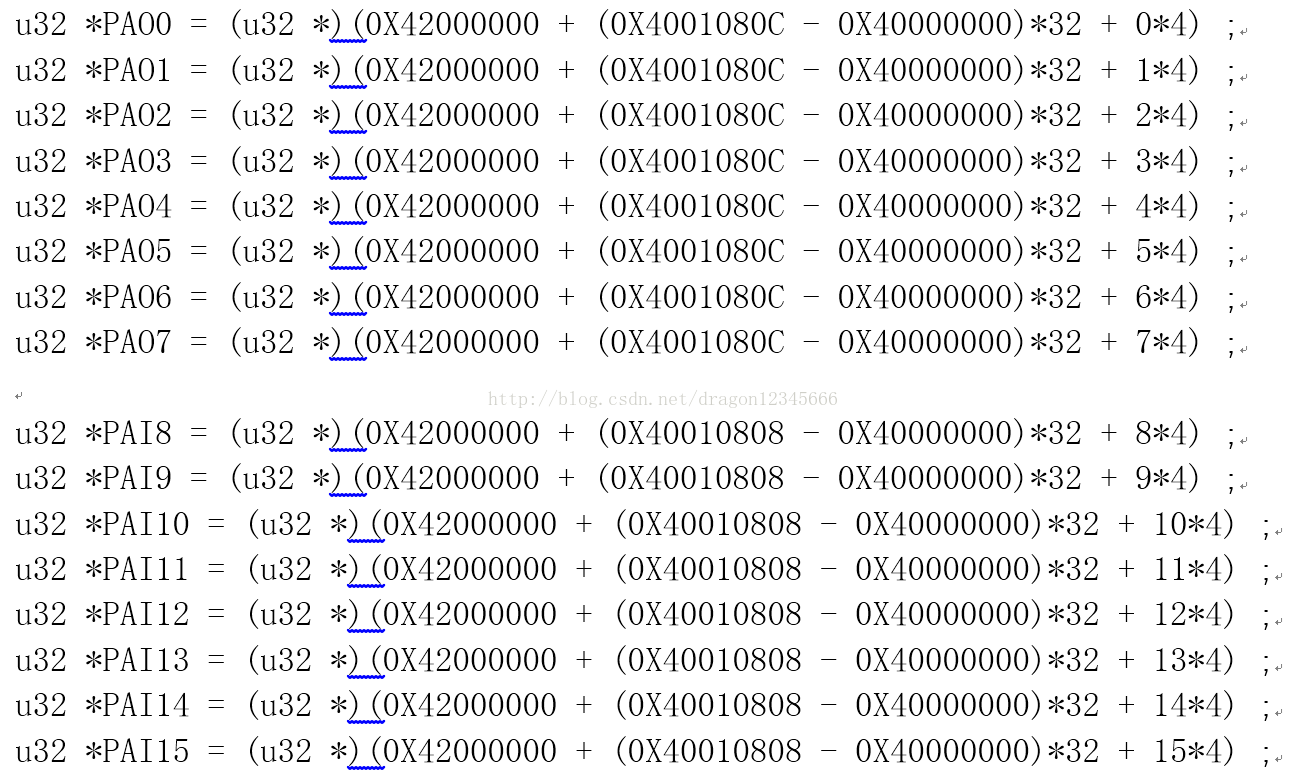
u32 *PAO0 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 0*4) ;
u32 *PAO1 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 1*4) ;
u32 *PAO2 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 2*4) ;
u32 *PAO3 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 3*4) ;
u32 *PAO4 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 4*4) ;
u32 *PAO5 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 5*4) ;
u32 *PAO6 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 6*4) ;
u32 *PAO7 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 7*4) ;
u32 *PAI8 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 8*4) ;
u32 *PAI9 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 9*4) ;
u32 *PAI10 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 10*4) ;
u32 *PAI11 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 11*4) ;
u32 *PAI12 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 12*4) ;
u32 *PAI13 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 13*4) ;
u32 *PAI14 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 14*4) ;
u32 *PAI15 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 15*4) ;
/* Private functions -----------------------------------------------------------------------------*/
/**************************************************************************************************
* Function Name : main
* Description : 从GPIOA.8-.16输入一个电平信号,GPIOA.0-.7口分别将对应引脚输入的电平信号输出
* Input : None
* Output : None
* Return : None
****************************************************************************************************/
int main(void)
{
/*--------控制STM32引脚GPIOA.0 GPIOA.1推挽输出高电平--------*/
//1、设置GPIOA的引脚的工作模式,即配置寄存器GPIOA_CRL 、 GPIOA_CRH
//GPIOA.0-.7推挽输出,速度50MHZ , GPIOA.8-.16浮空输入
GPIOA->CRL = 0x33333333 ; // CNF0 = 00 MODE0 = 11
GPIOA->CRH = 0x44444444 ; // CNF0 = 01 MODE0 = 00
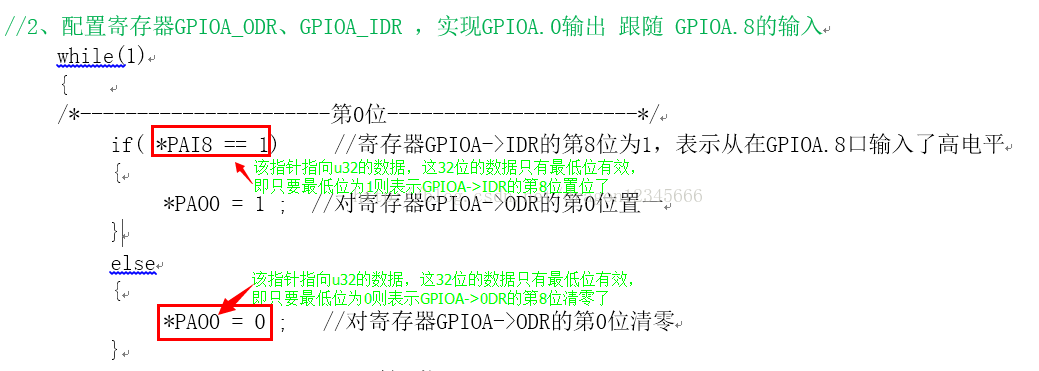
//2、配置寄存器GPIOA_ODR、GPIOA_IDR ,实现GPIOA.0输出 跟随 GPIOA.8的输入
while(1)
{
/*----------------------第0位----------------------*/
if( *PAI8 == 1) //寄存器GPIOA->IDR的第8位为1,表示从在GPIOA.8口输入了高电平
{
*PAO0 = 1 ; //对寄存器GPIOA->ODR的第0位置一
}
else
{
*PAO0 = 0 ; //对寄存器GPIOA->ODR的第0位清零
}
/*----------------------第1位----------------------*/
if( *PAI9 == 1) //寄存器GPIOA->IDR的第9位为1,表示从在GPIOA.9口输入了高电平
{
*PAO1 = 1 ; //对寄存器GPIOA->ODR的第1位置一
}
else
{
*PAO1 = 0 ; //对寄存器GPIOA->ODR的第1位清零
}
/*----------------------第2位----------------------*/
if( *PAI10 == 1) //寄存器GPIOA->IDR的第10位为1,表示从在GPIOA.10口输入了高电平
{
*PAO2 = 1 ; //对寄存器GPIOA->ODR的第2位置一
}
else
{
*PAO2 = 0 ; //对寄存器GPIOA->ODR的第2位清零
}
/*----------------------第3位----------------------*/
if( *PAI11 == 1) //寄存器GPIOA->IDR的第11位为1,表示从在GPIOA.11口输入了高电平
{
*PAO3 = 1 ; //对寄存器GPIOA->ODR的第3位置一
}
else
{
*PAO3 = 0 ; //对寄存器GPIOA->ODR的第3位清零
}
/*----------------------第4位----------------------*/
if( *PAI12 == 1) //寄存器GPIOA->IDR的第12位为1,表示从在GPIOA.12口输入了高电平
{
*PAO4 = 1 ; //对寄存器GPIOA->ODR的第4位置一
}
else
{
*PAO4 = 0 ; //对寄存器GPIOA->ODR的第4位清零
}
/*----------------------第5位----------------------*/
if( *PAI13 == 1) //寄存器GPIOA->IDR的第13位为1,表示从在GPIOA.13口输入了高电平
{
*PAO5 = 1 ; //对寄存器GPIOA->ODR的第5位置一
}
else
{
*PAO5 = 0 ; //对寄存器GPIOA->ODR的第5位清零
}
/*----------------------第6位----------------------*/
if( *PAI14 == 1) //寄存器GPIOA->IDR的第14位为1,表示从在GPIOA.14口输入了高电平
{
*PAO6 = 1 ; //对寄存器GPIOA->ODR的第6位置一
}
else
{
*PAO6 = 0 ; //对寄存器GPIOA->ODR的第6位清零
}
/*----------------------第7位----------------------*/
if( *PAI15 == 1) //寄存器GPIOA->IDR的第15位为1,表示从在GPIOA.15口输入了高电平
{
*PAO7 = 1 ; //对寄存器GPIOA->ODR的第7位置一
}
else
{
*PAO7 = 0 ; //对寄存器GPIOA->ODR的第7位清零
}
}
return 1 ;
}
4、利用宏定义函数对大量的位进行位绑定的步骤:


5、对大量的位进行位绑定的程序例举:
/**************************************************************************************************
* 硬件平台:STM32F103VC
* 学习重点:GPIOx的位绑定
* 实现功能:对于GPIOA端口的第八位输出 跟随 高八位的输入
**************************************************************************************************/
/*=============================================================================
* 位绑定公式:
* 1、SRAM区域 :0X2200 0000 ----0X200F FFFF
* Aliasaddr = 0X22000000 + ( A -0X20000000 )*32 + n*4
* 2、片上外设区域 :0X4200 0000 ----0X400F FFFF
* Aliasaddr = 0X42000000 + ( A -0X40000000 )*32 + n*4
* 参数解释:
* Aliasaddr : 设置“端口GPIOx的第n位”的寄存器_相应位的实际地址
* A : 端口GPIOx的基地址(GPIOx_BASE) + 相应寄存器的偏移地址
* n : 配置的是相应寄存器的第n位
* 寄存器的偏移地址 :CRL CRH IDR ODR BSRR BRR LCKR
* 00H 04H 08H 0CH 10H 14H 18H
=============================================================================*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_lib.h" //包含了所有的头文件 它是唯一一个用户需要包括在自己应用中的文件,起到应用和库之间界面的作用。
#include "stm32f10x_map.h"
///*-----------------------------------------------------------------------------------------------------------
// *将GPIOA的第3位作为输出引脚,寄存器ODR的偏移地址为0X0C
// * A = GPIOA_BASE + 0X0C = (APB2PERIPH_BASE + 0X0800) + 0X0C = ((PERIPR_BASE + 0X1000) + 0X0800) + 0X0C
// * = ((0X40000000 + 0X1000) + 0X0800) + 0X0C = 0X4001080C
// * n = 3 (设置寄存器ODR的第3位)
// * 将GPIOA的第11位作为输入引脚,寄存器IDR的偏移地址为0X08
// * A = GPIOA_BASE + 0X08 = (APB2PERIPH_BASE + 0X0800) + 0X08 = ((PERIPR_BASE + 0X1000) + 0X0800) + 0X08
// * = ((0X40000000 + 0X1000) + 0X0800) + 0X08 = 0X40010808
// * n = 11 (设置寄存器IDR的第11位)
// ------------------------------------------------------------------------------------------------------------*/
//
//u32 *PAO0 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 0*4) ;
//u32 *PAO1 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 1*4) ;
//u32 *PAO2 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 2*4) ;
//u32 *PAO3 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 3*4) ;
//u32 *PAO4 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 4*4) ;
//u32 *PAO5 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 5*4) ;
//u32 *PAO6 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 6*4) ;
//u32 *PAO7 = (u32 *)(0X42000000 + (0X4001080C - 0X40000000)*32 + 7*4) ;
//
//u32 *PAI8 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 8*4) ;
//u32 *PAI9 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 9*4) ;
//u32 *PAI10 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 10*4) ;
//u32 *PAI11 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 11*4) ;
//u32 *PAI12 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 12*4) ;
//u32 *PAI13 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 13*4) ;
//u32 *PAI14 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 14*4) ;
//u32 *PAI15 = (u32 *)(0X42000000 + (0X40010808 - 0X40000000)*32 + 15*4) ;
/******************************快速位绑定**********************************************************/
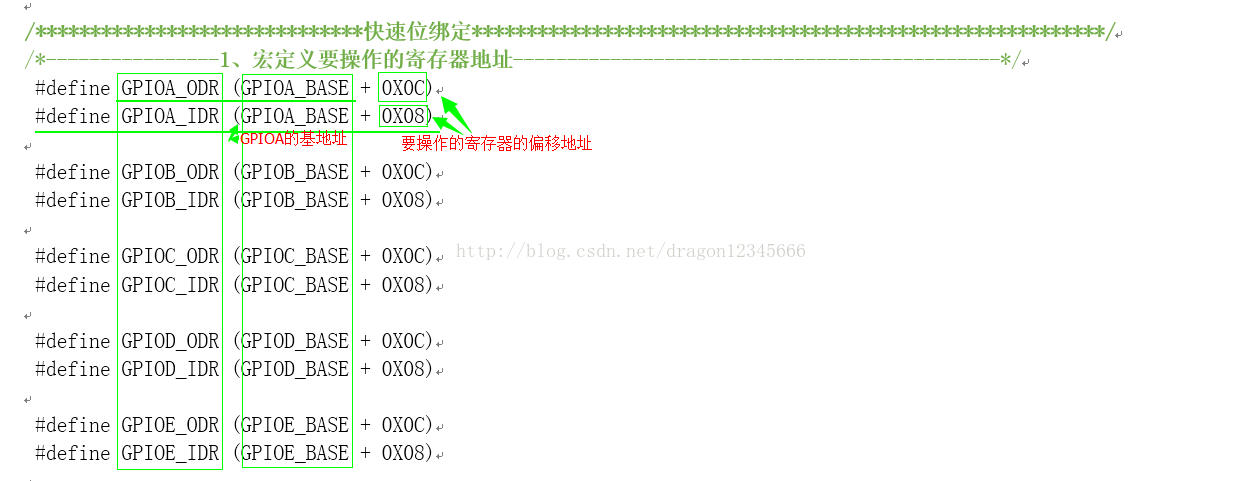
/*----------------1、宏定义要操作的寄存器地址---------------------------------------------*/
#define GPIOA_ODR (GPIOA_BASE + 0X0C)
#define GPIOA_IDR (GPIOA_BASE + 0X08)
#define GPIOB_ODR (GPIOB_BASE + 0X0C)
#define GPIOB_IDR (GPIOB_BASE + 0X08)
#define GPIOC_ODR (GPIOC_BASE + 0X0C)
#define GPIOC_IDR (GPIOC_BASE + 0X08)
#define GPIOD_ODR (GPIOD_BASE + 0X0C)
#define GPIOD_IDR (GPIOD_BASE + 0X08)
#define GPIOE_ODR (GPIOE_BASE + 0X0C)
#define GPIOE_IDR (GPIOE_BASE + 0X08)
/*----------------2、获取端口GPIOx(A-E)的对应寄存器的某一操作位的位地址-------------------*/
// #define BitBand(Addr , BitNum) *( (volatile unsigned long *)(Addr & 0xf0000000) + 0x2000000 + ((Addr&0xfffff)*32) + (BitNum*4) )
// 因为 左移、右移 语句的执行速度比乘除法语句的运动速度快,所以将上述语句改成如下方式
#define BitBand(Addr , BitNum) *( (volatile unsigned long *)( (Addr & 0xf0000000) + 0x2000000 + ((Addr&0xfffff)<<5) + (BitNum<<2) ) )
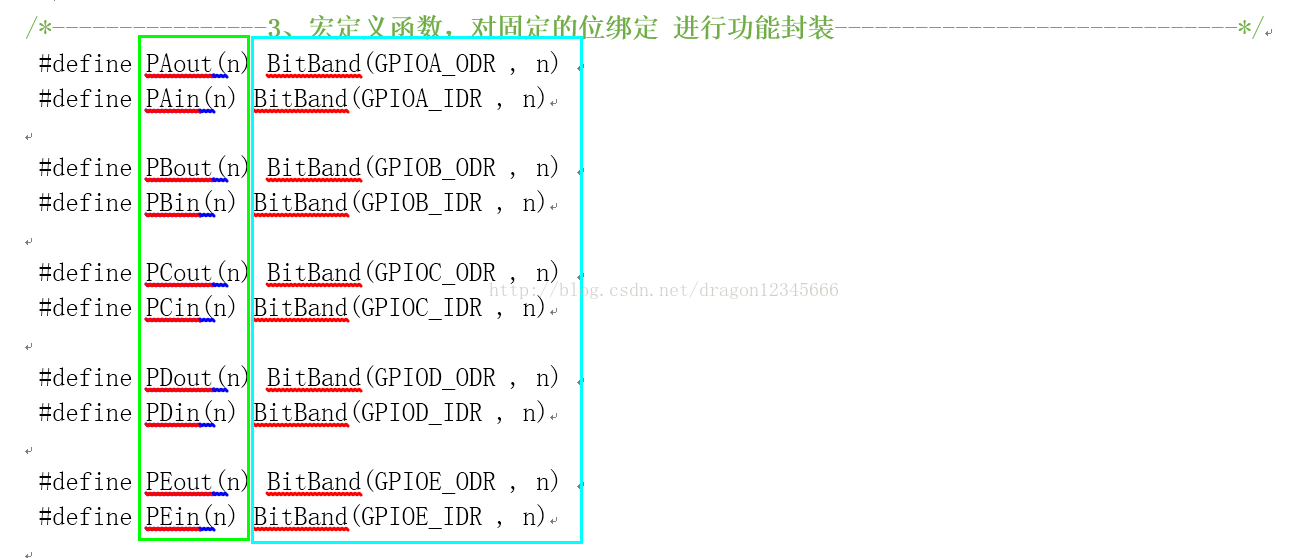
/*----------------3、宏定义函数,对固定的位绑定 进行功能封装------------------------------*/
#define PAout(n) BitBand(GPIOA_ODR , n)
#define PAin(n) BitBand(GPIOA_IDR , n)
#define PBout(n) BitBand(GPIOB_ODR , n)
#define PBin(n) BitBand(GPIOB_IDR , n)
#define PCout(n) BitBand(GPIOC_ODR , n)
#define PCin(n) BitBand(GPIOC_IDR , n)
#define PDout(n) BitBand(GPIOD_ODR , n)
#define PDin(n) BitBand(GPIOD_IDR , n)
#define PEout(n) BitBand(GPIOE_ODR , n)
#define PEin(n) BitBand(GPIOE_IDR , n)
/* Private functions -----------------------------------------------------------------------------*/
/**************************************************************************************************
* Function Name : main
* Description : 从GPIOA.8-.16输入一个电平信号,GPIOA.0-.7口分别将对应引脚输入的电平信号输出
* Input : None
* Output : None
* Return : None
****************************************************************************************************/
int main(void)
{
/*--------控制STM32引脚GPIOA.0 GPIOA.1推挽输出高电平--------*/
//1、设置GPIOA的引脚的工作模式,即配置寄存器GPIOA_CRL 、 GPIOA_CRH
//GPIOA.0-.7推挽输出,速度50MHZ , GPIOA.8-.16浮空输入
GPIOA->CRL = 0x33333333 ; // CNF0 = 00 MODE0 = 11
GPIOA->CRH = 0x44444444 ; // CNF0 = 01 MODE0 = 00
//2、配置寄存器GPIOA_ODR、GPIOA_IDR ,实现GPIOA.0输出 跟随 GPIOA.8的输入
while(1)
{
/*----------------------第0位----------------------*/
if( PAin(8) == 1) //寄存器GPIOA->IDR的第8位为1,表示从在GPIOA.8口输入了高电平
{
PAout(0) = 1 ; //对寄存器GPIOA->ODR的第0位置一
}
else
{
PAout(0) = 0 ; //对寄存器GPIOA->ODR的第0位清零
}
/*----------------------第1位----------------------*/
if( PAin(9) == 1) //寄存器GPIOA->IDR的第9位为1,表示从在GPIOA.9口输入了高电平
{
PAout(1) = 1 ; //对寄存器GPIOA->ODR的第1位置一
}
else
{
PAout(1) = 0 ; //对寄存器GPIOA->ODR的第1位清零
}
/*----------------------第2位----------------------*/
if( PAin(10) == 1) //寄存器GPIOA->IDR的第10位为1,表示从在GPIOA.10口输入了高电平
{
PAout(2) = 1 ; //对寄存器GPIOA->ODR的第2位置一
}
else
{
PAout(2) = 0 ; //对寄存器GPIOA->ODR的第2位清零
}
/*----------------------第3位----------------------*/
if( PAin(11) == 1) //寄存器GPIOA->IDR的第11位为1,表示从在GPIOA.11口输入了高电平
{
PAout(3) = 1 ; //对寄存器GPIOA->ODR的第3位置一
}
else
{
PAout(3) = 0 ; //对寄存器GPIOA->ODR的第3位清零
}
/*----------------------第4位----------------------*/
if( PAin(12) == 1) //寄存器GPIOA->IDR的第12位为1,表示从在GPIOA.12口输入了高电平
{
PAout(4) = 1 ; //对寄存器GPIOA->ODR的第4位置一
}
else
{
PAout(4) = 0 ; //对寄存器GPIOA->ODR的第4位清零
}
/*----------------------第5位----------------------*/
if( PAin(13) == 1) //寄存器GPIOA->IDR的第13位为1,表示从在GPIOA.13口输入了高电平
{
PAout(5) = 1 ; //对寄存器GPIOA->ODR的第5位置一
}
else
{
PAout(5) = 0 ; //对寄存器GPIOA->ODR的第5位清零
}
/*----------------------第6位----------------------*/
if( PAin(14) == 1) //寄存器GPIOA->IDR的第14位为1,表示从在GPIOA.14口输入了高电平
{
PAout(6) = 1 ; //对寄存器GPIOA->ODR的第6位置一
}
else
{
PAout(6) = 0 ; //对寄存器GPIOA->ODR的第6位清零
}
/*----------------------第7位----------------------*/
if( PAin(15) == 1) //寄存器GPIOA->IDR的第15位为1,表示从在GPIOA.15口输入了高电平
{
PAout(7) = 1 ; //对寄存器GPIOA->ODR的第7位置一
}
else
{
PAout(7) = 0 ; //对寄存器GPIOA->ODR的第7位清零
}
}
return 1 ;
}
上一篇:串行通信 软件仿真STM32与74LS164通信
下一篇:STM32F103 通过配置寄存器来控制I/O口
推荐阅读最新更新时间:2024-03-16 15:37

 嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版
嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版 控制之美(卷1)——控制理论从传递函数到状态空间
控制之美(卷1)——控制理论从传递函数到状态空间设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号