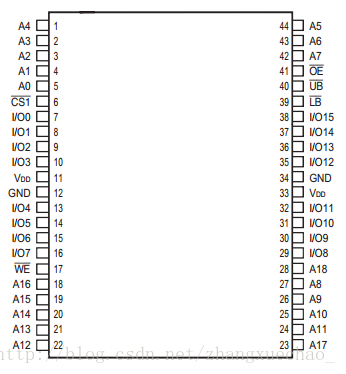
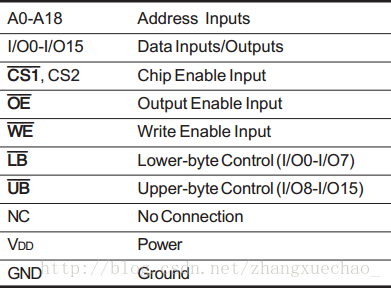
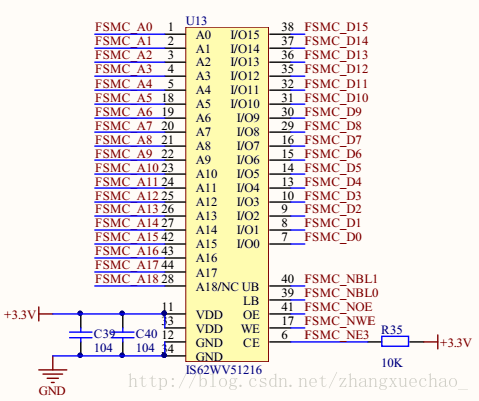
引脚定义
FSMC配置步骤
1.使能对应引脚GPIO时钟
2.配置GPIO引脚模式
3.使能FSMC时钟
4.FSMC初始化
5.存储器块使能
举例
#define Bank1_SRAM3_ADDR ((u32)(0x68000000)) //首地址0x60000000,每块0x40000000
void SRAM_gpio_init()
{
GPIO_InitTypeDef gpiof =
{
GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 |
GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15, //FSMC_A0 - FSMC_A9
GPIO_Speed_50MHz,
GPIO_Mode_AF_PP
};
GPIO_InitTypeDef gpiog0_5 =
{
GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5, //FSMC_A10 - FSMC_A15
GPIO_Speed_50MHz,
GPIO_Mode_AF_PP
};
GPIO_InitTypeDef gpiod =
{
GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | //FSMC_A15 - FSMC_A18
GPIO_Pin_14 | GPIO_Pin_15 | GPIO_Pin_0 | GPIO_Pin_1 | //FSMC_D0 - FSMC_D3
GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10, //FSMC_D13 - FSMC_D15
GPIO_Speed_50MHz,
GPIO_Mode_AF_PP
};
GPIO_InitTypeDef gpioe =
{
//FSMC_D4 - FSMC_D12
GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15,
GPIO_Speed_50MHz,
GPIO_Mode_AF_PP
};
GPIO_InitTypeDef gpioe0_1 =
{
GPIO_Pin_0 | GPIO_Pin_1, //FSMC_NBL0-FSMC_NBL1
GPIO_Speed_50MHz,
GPIO_Mode_AF_PP
};
GPIO_InitTypeDef gpiod4_5 =
{
GPIO_Pin_4 | GPIO_Pin_5, //FSMC_NOE - FSMC_NWE
GPIO_Speed_50MHz,
GPIO_Mode_AF_PP
};
GPIO_InitTypeDef gpiog10 =
{
GPIO_Pin_10, //片选
GPIO_Speed_50MHz,
GPIO_Mode_AF_PP
};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOF | RCC_APB2Periph_GPIOG | RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE, ENABLE);
GPIO_Init(GPIOF, &gpiof);
GPIO_Init(GPIOG, &gpiog0_5);
GPIO_Init(GPIOD, &gpiod);
GPIO_Init(GPIOE, &gpioe);
GPIO_Init(GPIOE, &gpioe0_1);
GPIO_Init(GPIOD, &gpiod4_5);
GPIO_Init(GPIOG, &gpiog10);
}
void FSMC_sram_init()
{
FSMC_NORSRAMInitTypeDef fsmc = {0};
FSMC_NORSRAMTimingInitTypeDef FSMC_ReadWriteTimingStruct = {0};
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_FSMC, ENABLE);
FSMC_ReadWriteTimingStruct.FSMC_AddressSetupTime = 0x00;
FSMC_ReadWriteTimingStruct.FSMC_AddressHoldTime = 0x00;
FSMC_ReadWriteTimingStruct.FSMC_DataSetupTime = 0x08;
FSMC_ReadWriteTimingStruct.FSMC_BusTurnAroundDuration = 0x00;
FSMC_ReadWriteTimingStruct.FSMC_CLKDivision = 0x00;
FSMC_ReadWriteTimingStruct.FSMC_DataLatency = 0x00;
FSMC_ReadWriteTimingStruct.FSMC_AccessMode = FSMC_AccessMode_A;
fsmc.FSMC_Bank = FSMC_Bank1_NORSRAM3;
fsmc.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable;
fsmc.FSMC_MemoryType = FSMC_MemoryType_SRAM;
fsmc.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b;
fsmc.FSMC_BurstAccessMode = FSMC_BurstAccessMode_Disable;
fsmc.FSMC_AsynchronousWait = FSMC_AsynchronousWait_Disable;
fsmc.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low;
fsmc.FSMC_WrapMode = FSMC_WrapMode_Disable;
fsmc.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState;
fsmc.FSMC_WriteOperation = FSMC_WriteOperation_Enable;
fsmc.FSMC_WaitSignal = FSMC_WaitSignal_Disable;
fsmc.FSMC_ExtendedMode = FSMC_ExtendedMode_Enable; //扩展模式使能
fsmc.FSMC_WriteBurst = FSMC_WriteBurst_Disable;
fsmc.FSMC_ReadWriteTimingStruct = &FSMC_ReadWriteTimingStruct;
fsmc.FSMC_WriteTimingStruct = &FSMC_ReadWriteTimingStruct;
FSMC_NORSRAMInit(&fsmc);
FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM3, ENABLE);
}
void SRAM_read(u8 *buf, u32 addr, u32 num)
{
u32 i = 0;
for(i = 0; i < num; i++)
{
buf[i] = *(u8*)(Bank1_SRAM3_ADDR + addr + i);
}
}
void SRAM_write(u8 *buf, u32 addr, u32 num)
{
u32 i = 0;
u8 *p = (u8*)(Bank1_SRAM3_ADDR + addr);
for(i = 0; i < num; i++)
{
*(p + i) = buf[i];
}
}
上一篇:STM32使用内部振荡器及其和外部晶体振荡器的区别
下一篇:关于STM32的BOOT0和BOOT1
推荐阅读最新更新时间:2024-03-16 16:02

 基于STM32F411的无刷直流电机FOC控制系统设计
基于STM32F411的无刷直流电机FOC控制系统设计
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号