项目需求
在制作一个使用全向轮的机器人底盘,对于全向轮,电机的精度是影响效果的重要因素。所以使用了步进电机,使用步进电机的优点是可以不使用编码器,开环控制即可达到高精度的效果。
调整占空比或者调整周期
众所周知,PWM有两个重要参数,周期与占空比。
步进电机的运动方式是,每收到一个脉冲,就旋转指定的角度。因此影响电机速度的唯一参数就是PWM的频率。以下附图两张来说明调整占空比与调整周期的区别。
周期固定,调整占空比
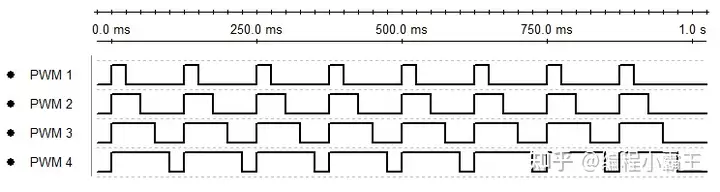
上图中有4个PWM,它们的周期是一样的,不同之处是拥有从80%至20%的占空比。可以看出,无论占空比为多少,在1s内,它们产生的高电平的数量是一样的,即无论占空比为多少,PWM的频率都一致。因此也就无法调整步进电机的速度。因为步进电机的速度仅与PWM的频率有关
占空比固定,调整周期
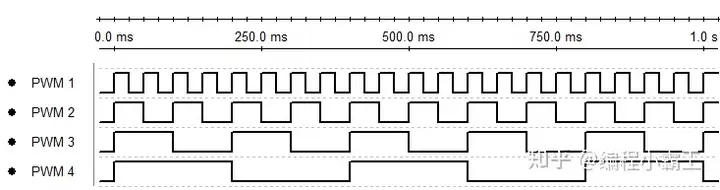
上图中有4个PWM,它们的占空比都固定为50%,却拥有不同的周期。可以看出,即使占空比固定,只要动态调整周期,PWM就能在相同时间内产生数量不同的脉冲。因此,固定占空比,动态调整PWM周期,即可达到控制步进电机速度的效果。
基于STM32的实现
在STM32F1中,定时器具有PWM模式,可以用来产生PWM。相关文章:STM32中PWM的配置与应用详解。但是,STM32的PWM模式,只要确定了时基单元(即确定了PWM周期),改变输出比较寄存器,仅可改变PWM的占空比。
若需要改变PWM周期,需不停地改变定时器的时基单元。但时基单元与硬件相关,不适合频繁变更。因此,步进电机的调速,不适合使用STM32下定时器的PWM模式来控制。
在多方查找资料后,确定了一种利用输出比较精确控制PWM周期的方式。
利用输出比较产生频率可变的PWM
利用输出比较产生频率可变的PWM,原理简单介绍如下:
首先配置定时器时基单元,确定脉冲最小长度单位CK。
然后开启定时器的输出比较,设置模式为翻转模式,并开启输出比较中断。
将定时器内计数器CNT当前值,加上脉冲长度X(单位为CK),写入输出比较寄存器。
在X个CK后,将会触发输出比较中断。同时电平翻转。
在中断中再次将当前计数器CNT的值,加上脉冲长度X,写入输出比较寄存器。
在X个CK后,将会触发输出比较中断。同时电平翻转。
在中断中再次将当前计数器CNT的值,加上脉冲长度X,写入输出比较寄存器。
如此往复……
以此即可得到一个占空比为50%,周期为2X个CK的PWM。
确定最小单位CK,配置时基单元
首先确定一个最小的间隔CK,规定PWM的高电平长度和低电平长度的单位都是CK。
即高电平的长度一定是CK的整数倍。低电平亦然。
然后配置定时器的时基单元,通过CK的长度确定预分频系数。
已知STM32F103的主频为72MHZ,则时基单元中预分频系数为

例如,rtz所确定的CK长度为10us(0.00001s),即可得出方程。
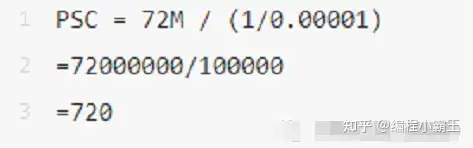
预分频系数确定为720后,由高速晶振产生的72MHZ的时钟信号被720分频,得到100000HZ的时钟信号。即时钟信号每秒变动100000次。每次10us。同时可将重装载值设定为0XFFFF(16位定时器的最大值)。因为本次使用的输出比较模式不使用更新中断,该值可随意设置。

开启输出比较通道,设置输出比较模式为翻转模式,并配置NVIC,开启输出比较中断,配置输出比较通道:

开启输出比较中断,配置NVIC优先级:

编写中断服务函数
在输出比较中断中,唯一要做的事情就是把当前CNT的值取出,加上脉冲长度X,写入输出比较寄存器。
当计数器达到0XFFFF(之前设定的重装载值)后,再加一会自动变为0.
例如,当前CNT值为0XFFFF,脉冲长度为5,很明显,输出比较寄存器应设置为0X0004才可触发下一次中断,而不是0X10004,这样会造成溢出。
因此将CNT的值与脉冲长度相加后,需要取0XFFFF的余数后,再写入输出比较寄存器。
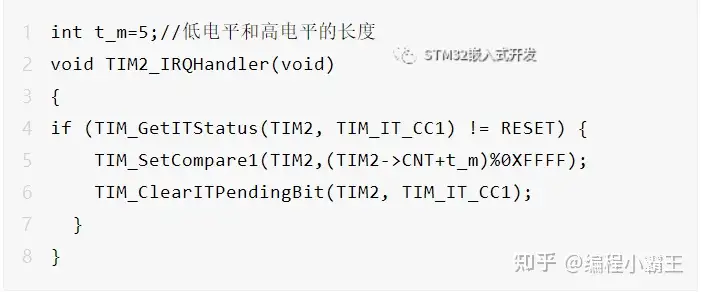
动态调整中断服务函数中的变量t_m,即可达到修改PWM频率的效果。
上一篇:STM32之红外遥控信号自学习实现
下一篇:基于STM32的六自由度机械臂控制与PID仿真
推荐阅读最新更新时间:2024-11-12 10:24

 usb_host_device_code
usb_host_device_code 单片机C语言程序设计及仿真
单片机C语言程序设计及仿真 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- PSoC5LP、U-MoBo ExM PsoC5LP 基于赛普拉斯 PSoC CY8C5868AXI-LP035 MCU
- 使用 ROHM Semiconductor 的 BD48K36G-TL 的参考设计
- LTC2946IMS 双向功率监视器的典型应用,在前向路径中具有能量和电荷监视器
- 升压模块1.2
- DSP调音BP1048山景芯片
- LTC2668CUJ-12、16 通道、12 位 ±10V VOUT SoftSpan DAC 的典型应用电路
- 使用 ROHM Semiconductor 的 BD48K44G-TL 的参考设计
- 具有峰值电流软启动、小尺寸的 LTC3631EMS8E、3.3V、100mA 稳压器的典型应用电路
- LTC3633AIUFD 1.2V/1.8V 降压稳压器的典型应用电路,具有一致跟踪和 6V 输入 UVLO
- 用于调整配置的 ADR361A、2.5V 低功耗、低噪声电压基准的典型应用












 京公网安备 11010802033920号
京公网安备 11010802033920号