1 概述
美国模拟器件公司(ADI)凭借其独特的iMEMS(集成MEMS)工艺将传感器单元和信号调理电路集成在一片芯片上,不仅减小器件尺寸、降低功耗和节省成本,同时提高性能和定制生产能力。ADXL203是一款高精度、低功耗及单一的iMEMS型双轴加速计,具有信号可调的电压输出。输出量为一个与加速度成比例的模拟电压信号,比例系数达到1 000 mV/g。该加速计既可测量动态加速度,又可以用来实现诸如重力加速度的静态测量,此时可以替代倾斜角传感器进行倾斜测量。
2 性能特点
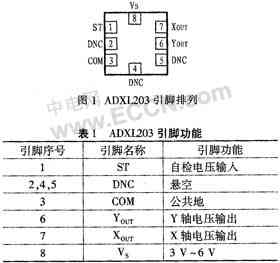
ADXL203典型测量范围为1.7 g,该加速计既可测量静态加速度可测量动态加速度,承受3 500 g极限加速度。其下拉电流小于700 μA,灵敏度达到1 000 mV/g。该加速计在-40℃~125℃温度范围内,具有0.3%的温度灵敏性;+25 mg的零点偏移精度;在小于60 Hz的带宽下具有小于1 mg的解决方案(0.06倾斜)以及优于0.1 mg/℃稳定性。采用5mm5 mm2 mm的LCC封装。ADXL203的引脚排列及引脚功能分别如图1和表1所示。
3 工作原理
ADXL203内部电路框图如图2所示。传感器输出幅值与所测加速度成正比的方波信号,经过信号交流放大、相敏检波、低通滤波,得到与加速度成比例的电压信号。

[page]传感器主要由一个利用表面微机械加工的多晶硅机构和一个差动电容器组成。多晶硅结构由多晶硅弹簧支撑,处于晶片的顶部,并与差动电容的运动中心极板相连。分别在差动电容的固定上下极板上加两路幅度相等、相位差为180的方波。在加速度的作用下,多晶硅结构会产生偏移,拉动差动电容的中心极板滑动,使两个电容容值不同,便在中心极板产生电压,传感器输出方波。输出方波的幅值与所测的加速度成正比。
4 使用说明
4.1 电源退耦
一般情况下,为了滤除供电电源产生的噪声,只需在加速计的VS和COM引脚间接一只0.1μF的电容,即图2中的CDC。但是,在有些情况下,特别是当内部时钟频率为140 kHz时,供电电源产生的噪声就会对加速计的输出信号产生不可忽视的干扰。当需要格外加退耦装置的时候,可以在加速计的供电电路中串入一个100 Ω(或更小)的电阻。另外,还可以在CDC上并联一只大阻值的旁路电容,容值在1μF~22μF之间选择。
4.2 带宽设置
ADXL203的带宽是通过XOUT和YOUT引脚连接的电容CX、CY来设置的。XOUT和YOUT引脚必须连接电容以实现低通滤波,从而实现对信号的去锯齿和噪声削弱。-3 dB带宽的计算公式为:
ADXL203的内部电阻尺RILT的标称值为32 kΩ,而其实际阻值可在14 kΩ~40 kΩ间选择,加速计的带宽计算也要相应的产生变化。表2给出RFILT、为32 kΩ时滤波电容CX、CY的容值选择与带宽的对应关系。应注意的是,任何情况下CX、CY的容值都不能小于2 000 pF。

另外,建立时间会随着CX、CY的增大而增大。其计算公式为:
其中C表示CX或者CY,单位为μF。选CY为0.1μF时,开启时间为20 ms。
4.3 自检模式
[page] ADXL203的ST引脚为自检电平输入端。当ST引脚接VS时,加速计进入自检模式,此时会在传感器中心极板产生静电力,使其偏移。由加速计输出电压的值就可以判断出加速计功能是否正常。自检时,输出端的典型电压变化量为700 mV(对应加速度为 700 mg)。在非自检模式时,ST引脚可以开路或接COM端。
ST引脚所接的电压大小不能超过VS+0.3 V。如果在电路设计时不能保证这一点(如多电压供电时),最好能在ST和VS引脚间接入一个低正向电压VF的箝位二极管。
4.4 噪声与带宽的权衡选择
ADXL203输出信号带宽决定了测量精度。可通过滤波减小噪声低密度,提高测量精度。其输出信号带宽的典型值为2.5 kHz。对信号进行滤波可以有效防止频率混叠。ADXL203允许根据实际需要改变XOUT、YOUT引脚处的滤波电容大小来设置输出信号的带宽。但要保证其输出信号带宽不能超过A/D转换采样频率大小的一半。当进一步减小信号带宽时,可以减小噪声,提高测量精度。
ADXL203的噪声属于高斯白噪声,其功率谱密度在所有频率下为常数。噪声(RMS)的计算公式为:
例如,带宽为100 Hz时的噪声大小为:
噪声与信号带宽的平方根成正比,使用时应根据需要尽量减小带宽,以提高加速计测量精度,增大测量动态范围。
噪声峰-峰值的估算可参照表3。而表4给出的是GX、GY的选择与噪声峰-峰值的对应关系。

[page]4.5 供电电压
ADXL203的性能都是在5 V典型电压供电时测试和标定的。实际上,供电电压VS可在3 V~6 V之间选择。供电电压不同时,加速计的一些性能指标自然也会随之改变。
ADXL203的输出电压与加速度是成比例的,当供电电压改变时,灵敏度就会发生相应改变,影响测量精度。例如,当VS=3 V时,输出电压比例系数变为560 mV/g。
0 g对应输出电压也与VS成比例,其值为VS/2。
输出噪声虽然不与VS成比例,但其大小也受到很大影响。因为当增大供电电压时,输出电压比例系数就会增大,而噪声电压保持不变。所以,噪声密度随着供电电压的增大而减小。当VS=3 V时,噪声密度为190μg/(Hz)1/2。
自检模式的g值输出可以粗略地认为与供电电压的平方成正比。而灵敏度系数又是与供电电压成比例的,所以自检模式时的电压输出就与供电电压的立方成正比。在VS=3 V时,自检输出典型值约为150 mV,对应的g值为270 mg。
当供电电压减小时,供电电流随之减小。3 V电压供电时的供电电流为450μA。
5 ADXL203在倾斜度测量中的应用
5.1 测量原理
ADXL203最常见的应用是进行倾斜度测量。加速计以重力矢量作为基准来测定物体的空间方位。当加速计的感应轴与重力方向垂直(即感应轴水平)时,它对倾斜度的变化是最敏感的,倾斜度每变化1,输出g值变化17.5 mg;当感应轴与水平成45角时,倾斜度每变化1,输出g值变化12.2 mg;而当感应轴与重力方向接近平行时(所感应到的加速度接近+g或-g),倾斜度每变化1,加速计输出几乎没有什么变化。随着测量倾斜角度的增大,测量精度下降。
将加速计的X和Y轴都水平放置,就可以作为双轴倾斜计测量倾斜度,如图3所示。将输出模拟电压信号VX,VY换算成对应的g值变化量AX,AY为:

代入下面公式计算得到X、Y轴的倾斜角度俯仰角(pitch)和倾斜角(roll)。
[page]5.2 测量电路
ADXL203输出的是模拟电压信号。可直接进行A/D采样。这里选用ADI公司的单片机ADuC847,其内部集成了速度可以达到420 ks/s的24位△-∑ADC。硬件连接图如图4所示。

ADXL203输出的X、Y轴的测量信号分别经低通滤波,再通过差动输入方式输入ADC,其中VIN㈠端接2.5 V电压。而为了得到更高的精度,给ADC外接2.5 V参考电压。另外,为了滤除供电电源产生的噪声,图中采用0.1μF和10μF电容并联接入供电电路进行电源退耦。
5.3 参数设置及分析
设计的系统要求倾斜测量分辨率达到0.06,测量范围0~100则加速计及ADC的参数应该如何设置才能达到测量要求呢?下面对此进行分析。对于加速计ADXL203,测量得到的g与所测角度α的函数曲线是一段正弦曲线,如图5所示。由于g与α为非线性关系,所以测量范围内,α变化0.06对应的g值变化量会随所测量角度大小的变化而变化。


[page]当α=-10时,△g=1.03 mg。可见,加速计在0 g位置时具有最高灵敏度,随着倾斜角度的增大,灵敏度降低。所以系统至少要分辨出1.03mg的g值变化,对应电压输出变化量为1.03 mV。
ADXL203的可选带宽范围为0.5 Hz~2 500 Hz。这里是为了对某时刻的倾斜角进行测量,设置加速计1Hz带宽即可以满足测量要求。此时加速计噪声均方值为:
此时,滤波电容大小选为4.7μF。
其建立时间为ton=1604.7μF+4 ms=756 ms。
ADuC847内部集成的△-∑ADC数据刷新率越低,越有利于提高分辨率。可通过ADuC847内部SF寄存器设置ADC的数据刷新率为16.06 Hz。这样既可得到相同条件下更好的分辨率,又保证不丢失任何测量信号信息。加速计的0 g输出电压为2.5 V,输出电压范围为2.3 V~2.7 V,则相应选择ADC输入电压范围+320 mV即可。这时ADC达到17位无噪声码分辨率。于是:
LSB=640 mV/217=0.005 mV,量化噪声0.002 5 mV。
传感器输出信号中的噪声,将对ADC转换结果产生误差,影响精度。另一方面,ADC本身的有效输入噪声、量化噪声等都影响ADC转换精度。△-∑ADC利用过采样原理,通过数字滤波和抽取移去带外量化噪声并改善ADC的分辨率,提高转换精度。
6 结束语
ADXL203是晶体硅固体结构的加速计,受温度的影响极小,保证了系统的稳定性。利用ADXL203进行倾斜测量精度高,功耗低。而它体积小,双轴输入,又能减化电路的设计和安装。文中给出的电路易于实现,且功耗低,能达到很高的精度要求。
上一篇:测量放大器共模抑制能力的研究及分析计算
下一篇:德州仪器推出单电源自动归零传感器放大器
推荐阅读最新更新时间:2023-10-12 20:14

- 热门资源推荐
- 热门放大器推荐
 电网络分析与综合 (吴宁)
电网络分析与综合 (吴宁)





- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- 左手车钥匙,右手活体检测雷达,UWB上车势在必行!
- 狂飙十年,国产CIS挤上牌桌
- 神盾短刀电池+雷神EM-i超级电混,吉利新能源甩出了两张“王炸”
- 浅谈功能安全之故障(fault),错误(error),失效(failure)
- 智能汽车2.0周期,这几大核心产业链迎来重大机会!
- 美日研发新型电池,宁德时代面临挑战?中国新能源电池产业如何应对?
- Rambus推出业界首款HBM 4控制器IP:背后有哪些技术细节?
- 村田推出高精度汽车用6轴惯性传感器
- 福特获得预充电报警专利 有助于节约成本和应对紧急情况
- Sungrow为越南201MW太阳能项目提供逆变器
- 赛为智能推出的四足激光除草机器人 可用于多个领域
- 家电行业重燃战火 智能扫地机器人成新风口
- 现代摩比斯发布新的后方自动紧急制动系统 超短程雷达替代超声波传感器
- 增强工业自动控制系统感知能力,扩大未来市场
- error: #5: cannot open source input file "core_cm3.h": No such file or directory
- 9.STM32中对SysTick_Init()函数和Delay_us()的理解
- 8.STM32中对ADC1_Config()函数的理解(自定义)测试ADC转换电压值
- 中国移动将于 10 月发布 5G 套餐,用户无需换卡换号
- 2019工博会,第三视角下的仙知科技魅力~




 京公网安备 11010802033920号
京公网安备 11010802033920号