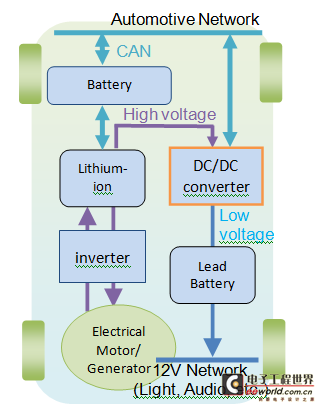
人们对气候变化和汽油价格的担忧,使得混合动力汽车和纯电动汽车等环保汽车市场日益升温。这些汽车往往通过一台由高压锂电池驱动的电动机获取动力。为了实现最高效率,我们通常需要使用一个DC/DC变压器将这台动力强劲的直流电动机的驱动电压提升至数百伏。与此同时,混合动力汽车和纯电动汽车通常使用与燃油汽车相同的电子控制单元来实现车身控制、仪表盘信息显示等功能。这意味着这些电子设计需要使用12V电源。因此,还需要使用一个DC/DC转换器变压器将锂离子电池的数百伏输出电压降至标准的12V直流电压。
由于ECU负责执行各种关键性任务,因此,DC/DC变压器对于确保车辆的安全运行至关重要。此外,该转换器还必需高效,而且即使在电池电压发生波动时,也必须为ECU提供稳定的电源。其电路设计必须足够精准、高效和紧凑,以适合空间受限有限的汽车系统。最重要的是,它必须可靠,因为ECU的任何一个故障都可能导致车辆失控、损坏甚至人员伤亡。
然而,卓越的DC/DC变压器离不开卓越的控制器。Spansion半导体的新技术利用MCU的数字处理能力成功缩减了组件的数量,它能够利用软件平台轻松灵活地满足系统要求,而且还能通过车载网络向驾驶员显示故障信息,从而简化了车辆的维护工作。
数字化的优势
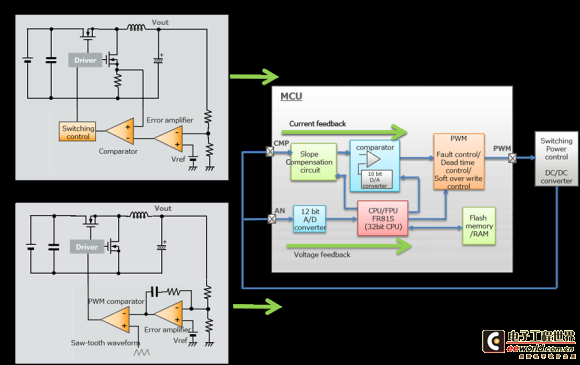
为了更好地了解MCU如何影响数字DC/DC变压器的运行和功能,让我们以Spansion MB91550为例。这款MCU能够同时实现两个控制环,一个用于控制输出电压,另一个用于控制电流(见图2)。这个以200MHz时钟频率运行的MCU能够生成一个精准的PWM波形,而这是保持精准控制的关键所在。通过PWM转化输出的周期进行相位调整能够对其进行功率因数校正(PFC)。另外,此款MCU还符合ISO26262定义的功能安全要求。
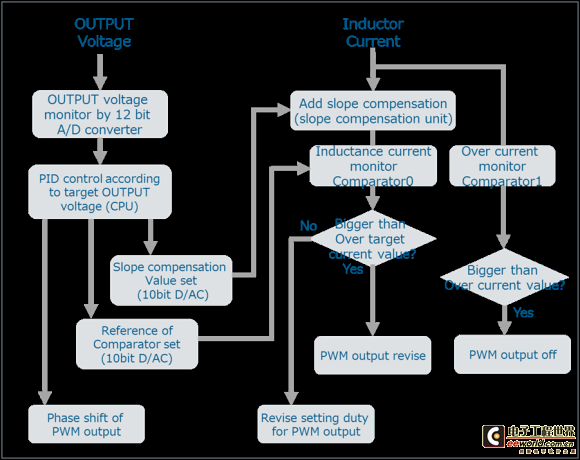
让我们仔细研究一下整个过程。一个12位A/D转换器对电压进行数字化处理,然后,一个配有FPU的32位CPU设定一个比较器参考值和一个斜率补偿值,目的是将电压降至目标电压(见图3)。这个斜率补偿值通过一个10位D/A转换器被发送到电流反馈环的斜率补偿单元。经过CPU处理后,电流进入一个比较器,后者检查其与预先设定的参考值的偏离。转换器根据匹配结果调整当前转换周期的PWM输出的工作周期。如果电流大于上述参考值,则表示发生了过流情况,MCU将切换至“off”状态,同时修正被控制的PWM输出。
混合动力汽车和电动汽车是未来环保汽车市场的重要组成部分。本文重点关注了车用MCU,但实际上,市场上还存在各种各样的直流设备和系统,例如,需要电源管理的太阳能电池板等。我们在此探讨的MCU类型可被应用于众多同类系统,用以提升它们的效率、性能和安全性。
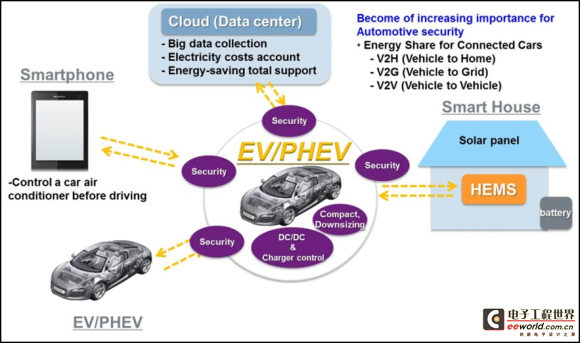
图 5: 在未来的联网世界中,安全性将是至关重要的
微控制器不仅能够助力打造一个高效的社会,而且还能打造一个安全的社会。为了实现这个愿景,未来的数字电子器件应能在很多方面从容应对以下趋势和挑战:
在不远的将来,所有事物都将联网。汽车对于交通而言非常重要,但如果不能很好地抵御网络攻击,它们也会成为威胁。MCU等数字组件需要保护车辆免遭外部网络攻击(见图5)。
基于模型的开发(MBD)能够通过代码自动生成大幅缩短嵌入式软件的开发时间。在模拟环境中,我们甚至能够在获得实物系统之前测试各类安全隐患。通过分析系统对标准测试中可能不会出现的各种异常事件的响应,模拟环境能够帮助我们开发出更安全的系统。
集成能够降低成本,同时优化性能。
关键字:MCU 电动汽车
引用地址:MCU改善DC/DC变压器输出在混动/电动汽车上的应用

图1:在一台环保汽车中,一个转换器将锂离子电池的输出电压提升至数百伏直流电压(橙色),用以驱动电动机;同时将输出电压降至12V直流电压DC,用以驱动ECU(浅蓝色)。CAN总线网络用深蓝色表示。
| Automotive network | 车载网络 |
| Battery | 电池 |
| High voltage | 高电压 |
| Lithium-ion | 锂电子电池 |
| DC/DC converter | DC/DC转换器 |
| Inverter | 转换器逆变器 |
| Low voltage | 低电压 |
| Lead battery | 铅蓄电池 |
| Electrical motor/generator | 电机/发电机 |
| 12V network (Light, audio,etc.) |
12V网络 (灯、音频等) |
由于ECU负责执行各种关键性任务,因此,DC/DC变压器对于确保车辆的安全运行至关重要。此外,该转换器还必需高效,而且即使在电池电压发生波动时,也必须为ECU提供稳定的电源。其电路设计必须足够精准、高效和紧凑,以适合空间受限有限的汽车系统。最重要的是,它必须可靠,因为ECU的任何一个故障都可能导致车辆失控、损坏甚至人员伤亡。
然而,卓越的DC/DC变压器离不开卓越的控制器。Spansion半导体的新技术利用MCU的数字处理能力成功缩减了组件的数量,它能够利用软件平台轻松灵活地满足系统要求,而且还能通过车载网络向驾驶员显示故障信息,从而简化了车辆的维护工作。
数字化的优势
为了更好地了解MCU如何影响数字DC/DC变压器的运行和功能,让我们以Spansion MB91550为例。这款MCU能够同时实现两个控制环,一个用于控制输出电压,另一个用于控制电流(见图2)。这个以200MHz时钟频率运行的MCU能够生成一个精准的PWM波形,而这是保持精准控制的关键所在。通过PWM转化输出的周期进行相位调整能够对其进行功率因数校正(PFC)。另外,此款MCU还符合ISO26262定义的功能安全要求。

图 2: 在斜率补偿单元和比较器的协助下, MB91550 单片机可以控制数字直流/直流转换器变压器,从而搭建一个高效的系统。
| Current feedback control block diagram | 电流反馈控制框图 | Current feedback | 电流反馈 |
| Vout | 输出电压 | Inductor current | 电感电流 |
| Switching control | 切换控制 | Slope compensation circuit | 斜坡补偿电路 |
| Comparator | 比较器 | comparator | 比较器 |
| Error amplifier | 误差放大器 | 10 bit D/A converter | 10位D/A转换器 |
| Vref | 参考电压 | Fault control/dead time control/soft overwrite control | 故障控制/停滞时间控制/软覆盖控制 |
| Voltage feedback control block diagram | 电压反馈控制框图 | Switching power control | 切换功率控制 |
| Vout | 输出电压 | DC/DC converter | DC/DC变压器 |
| Driver | 驱动器 | Output voltage | 输出电压 |
| PWM comparator | PWM比较器 | 12 bit A/D converter | 12位 A/D 转换器 |
| Error amplifier | 误差放大器 | Flash memory/RAM | 闪存/RAM |
| Saw-tooth waveform | 锯齿波形 | Voltage feedback | 电压反馈 |
| Vref | 参考电压 | Inductor current/ Output voltage | 电感电流/输出电压 |
| Embedded comparator | 嵌入式比较器 |
让我们仔细研究一下整个过程。一个12位A/D转换器对电压进行数字化处理,然后,一个配有FPU的32位CPU设定一个比较器参考值和一个斜率补偿值,目的是将电压降至目标电压(见图3)。这个斜率补偿值通过一个10位D/A转换器被发送到电流反馈环的斜率补偿单元。经过CPU处理后,电流进入一个比较器,后者检查其与预先设定的参考值的偏离。转换器根据匹配结果调整当前转换周期的PWM输出的工作周期。如果电流大于上述参考值,则表示发生了过流情况,MCU将切换至“off”状态,同时修正被控制的PWM输出。

图3: 比较器比较电感电流和参考值,以便确定如何修改PWM输出参数,以提供稳定的电压。
| Output voltage | 输出电压 |
| Output voltage monitor by 12 bit A/D converter | 12位 A/D 转换器监测输出电压 |
| PID control according to target OUTPUT voltage (CPU) | 根据目标输出电压控制PID(CPU) |
| Slope compensation value set(10 bit D/AC) | 斜坡补偿值集(10位D/AC) |
| Reference of comparator set (10 bit D/AC) | 比较器参考值(10位D/AC) |
| Phase shift of PWM output | PWM输出的相移 |
| Inductor current | 电感电流 |
| Add slope compensation(slope compensation unit) | 增加斜坡补偿(斜坡补偿单元) |
| Inductance current monitor Comparator0 | 监测电感电流(比较器0) |
| Bigger than over target current value? | 大于过流目标值? |
| PWM output revise | PWM修正输出 |
| Revise setting duty for PWM output | 修正PWM输出的工作周期 |
| Over current monitor comparator1 | 监视过流(比较器1) |
| Bigger than over current value? | 大于过流值? |
| PWM output off | PWM输出关闭 |
| Yes | 是 |
| No | 否 |
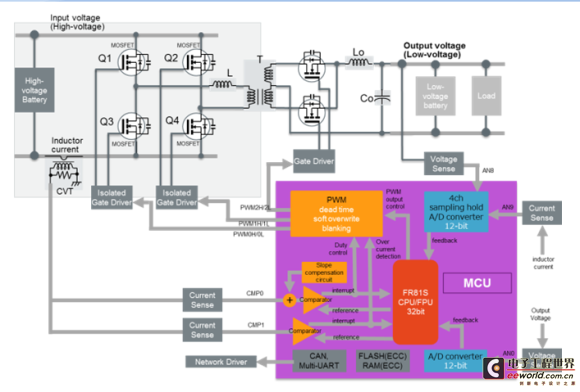
斜率补偿电路和专用比较器让MCU能够控制DC/DC变压器的PWM工作周期,而且无需等待下一个工作周期。这是MCU的一大优势:转换器能够响应实际电动机负载的快速波动,并检测目标系统的电流和电压。PWM输出电路支持一个发电机空载计时器和用于波形控制的相移功能(见图4)。

图4: 此图为一个相移——全桥DC/DC转换器电路
| Input voltage(high-voltage) | 输入电压(高电压) |
| High-voltage battery | 高电压电池 |
| Inductor current | 电感电流 |
| Isolated gate driver | 隔离网关驱动器 |
| Current sense | 电流检测 |
| Network driver | 网络驱动器 |
| Output voltage(low-voltage) | 输出电压(低电压) |
| Low-voltage battery | 低电压电池 |
| Load | 负载 |
| Gate driver | 网关驱动器 |
| Voltage sense | 电压检测 |
| PWM dead time soft overwrite blanking | PWM停滞时间软覆盖消除 |
| PWM output control | PWM输出控制 |
| 4ch sampling hold A/D converter 12 bit | 12位A/D转换器4ch采样保持 |
| Duty control | 周期控制 |
| Over current detection | 过流检测 |
| feedback | 反馈 |
| Inductor current | 电感电流 |
| Slope compensation circuit | 斜坡补偿电路 |
| Comparator | 比较器 |
| Interrupt | 中断 |
| reference | 参考 |
| A/D converter 12 bit | 12位A/D转换器 |
| Output voltage | 输出电压 |
| Flash(ECC) | 闪存(错误检查与纠错) |
| RAM(ECC) | 内存(错误检查与纠错) |
| FR81S CPU/FPU 32 bit | 32位 FR81S CPU/FPU |
展望未来
混合动力汽车和电动汽车是未来环保汽车市场的重要组成部分。本文重点关注了车用MCU,但实际上,市场上还存在各种各样的直流设备和系统,例如,需要电源管理的太阳能电池板等。我们在此探讨的MCU类型可被应用于众多同类系统,用以提升它们的效率、性能和安全性。

图 5: 在未来的联网世界中,安全性将是至关重要的
| Smart phone | 智能手机 |
| Control a car air conditioner before driving | 开车前控制车载空调 |
| Cloud(data center) | 云(数据中心) |
| Big data collection | 大数据收集 |
| Electricity costs account | 电费计算 |
| Energy-saving total support | 节能支持 |
| Security | 安全 |
| Compact, downsizing | 紧凑,缩减尺寸 |
| DC/DC& Charger control | DC/DC&充电器控制 |
| Become of increasing importance for automotive security | 对于汽车的安全性越来越重要 |
| Energy share for connected cars | 联网汽车的能源共享 |
| V2H(vehicle to home) | V2H(车辆到家) |
| V2G(vehicle to grid) | V2G(车辆到电网) |
| V2V(vehicle to vehicle) | V2V(车辆到车辆) |
| Smart houst | 智能家庭 |
| Solar panel | 太阳能电池板 |
| Battery | 电池 |
微控制器不仅能够助力打造一个高效的社会,而且还能打造一个安全的社会。为了实现这个愿景,未来的数字电子器件应能在很多方面从容应对以下趋势和挑战:
在不远的将来,所有事物都将联网。汽车对于交通而言非常重要,但如果不能很好地抵御网络攻击,它们也会成为威胁。MCU等数字组件需要保护车辆免遭外部网络攻击(见图5)。
基于模型的开发(MBD)能够通过代码自动生成大幅缩短嵌入式软件的开发时间。在模拟环境中,我们甚至能够在获得实物系统之前测试各类安全隐患。通过分析系统对标准测试中可能不会出现的各种异常事件的响应,模拟环境能够帮助我们开发出更安全的系统。
集成能够降低成本,同时优化性能。
上一篇:沈承鹏:新能源汽车将成未来之车
下一篇:英飞凌引领三大电动汽车项目:让更多电动汽车在欧洲上路
推荐阅读最新更新时间:2024-07-25 19:06
实时多任务操作系统(RTOS)进入单片机开发领域
1.实时多任务操作系统(RTOS) (1)更加面向硬件系统,而不是操作者 嵌入式系统处理器一般都是独立工作的,没有人的直接参与;即使参与,也没有大量的文字信息输出,这是和桌面计算机有所不同的。因此RTOS着重面向的是硬件,而不是具有完整的人机界面。 (2)实时性 单片机系统的监测、控制、通信等工作都要求实时性,一旦出现有关情况,CPU能够及时响应,刻不容缓。为此,一个实用的RTOS都应具有完善的中断响应机制,保证中断响应潜伏时间足够短。 (3)多任务 半导体技术的发展和应用复杂性的增长促使CPU的处理能力越来越高,当今的一片16位或32位单片机,在运算速度、寻址能力等方面可以相当于8位单片机的几十片之和。在这样强大的处理器上运行应用
[单片机]
基于单片机控制的智能充电器的设计与实现

1 引言 铅酸蓄电池是目前大容量电池的主要品种,其制造成本低、容量大、价格低廉,使用范围非常广泛。铅酸蓄电池的基本充电方式有两种:恒压充电和恒流充电。如果单独采用一种方法,比如恒流法,则在充电后期由于充电电流不变,容易使容量下降而提前报废。单独采用恒压法,充电初期电流过大,可能致使电极活性物质脱落,后期电流又过小,形成长期充电不足,影响蓄电池的使用寿命 。因此,充电器大部分都是综合采用两种方法的多阶段充电方式。近年来,先恒流、再恒压、最后恒压浮充的三阶段充电方式被逐渐接受。 目前,三阶段充电方式主要采用模拟控制的方案。虽然具有实时性好、带宽高的优点,但其硬件电路复杂,控制不灵活。为此,本文设计了一种数字控制的充电器,采用单片机
[单片机]

基于单片机平台的最小偏差圆弧插补算法
在CNC机床的G代码中,最常见的有G0、G1、G2、G3代码,分别表示直线和圆弧插补,直线插补对于单片机来说,比较容易实现,只需要将位移增量转换为脉冲增量然后输出给步进电机就可以了,但对于圆弧插补,则需要单片机根据G指令中给出的起始点、半径、结束点这三个参数来控制X Y轴进行圆周运动;因此需要通过特定的圆弧插补算法来控制步进电机运动,圆弧插补算法比较多,常用的有逐点比较法、最小偏差法和数字积分法等等,本文使用的是逐点比较法。 先不介绍逐点比较插补算法的原理,给出一幅图,下面再结合文字进行介绍。 一、判断圆弧所在象限 在G代码的圆弧插补指令中,给出的圆弧可以是任意象限的,而不同象限的圆弧绘制算法又不一样,因此首先需要判断圆弧所
[单片机]
单片机入门必备知识(3)
单片机学习 目前,很多人对汇编语言并不认可。可以说,掌握用C语言单片机编程很重要,可以大大提高开发的效率。不过初学者可以不了解单片机的汇编语言,但一定要了解单片机具体性能和特点,不然在单片机领域是比较致命的。如果不考虑单片机硬件资源,在KEIL中用C胡乱编程,结果只能是出了问题无法解决!可以肯定的说,最好的C语言单片机工程师都是从汇编走出来的编程者因为单片机的C语言虽然是高级语言,但是它不同于台式机个人电脑上的VC++什么的单片机的硬件资源不是非常强大,不同于我们用VC、VB等高级语言在台式PC上写程序毕竟台式电脑的硬件非常强大,所以才可以不考虑硬件资源的问题。还有就是在单片机编程中C语言虽然编程方便,便于人们阅读,但是在执行效率
[单片机]
儿童版特斯拉面世,这是要教娃娃走高端路线吗?
特斯拉 推出了一款微型的特斯拉Model S,可以让孩子从小就体验当高富帅的感觉。而这款车无论从任何细节上来看,几乎都与Model S完全一样,只是被缩小了而已。而如果你只是把它当一款玩具来看待的话,那么 500 美元的售价也已经算是一款昂贵的玩具了。并且,你甚至可以额外花费50美元选择车的内饰!并且,还可以通过在尾部加入一个额外的电池以提供额外百分之50的运行时间。而它的行驶速度则可以达到最快6英里/小时(约合9.6千米/小时),能够承受一个重量在81磅(36.7千克)以下的“司机”。
[嵌入式]
PIC16F877A单片机的基本功能模块
PIC16F877A单片机是MicroChip公司的中档产品,它采用14位的RISC指令系统,内部集成了A/D转换器、EEPROM、模拟比较器、带比较和捕捉功能的定时器/计数器、PWM输出,异步串行通信( USART)电路等。 1).程序存储器和堆栈PIC16F877A单片机内部具有8K×14位的Flash程序存储器,程序存储器具有13位宽的程序计数器PCo程序存储器的地址范围为OOOOH—1FFFH。由程序计数器提供13条地址线进行单元选择,每个单元宽14位(即PIC16F877A的指令字节宽度为14位),能够存放一条PIC单片机系统指令。 在系统上电或其他复位情况下,程序计数器均从OOOOH地址单元开始工作。如
[单片机]
单片机的罢工
一振荡器停止振荡 又可分为电源电压不稳,或者是强干扰引起的振荡器停振。 二PC指针跑飞 电源电压不稳或强干扰引起PC跑飞,如果看门狗不好,也会死机。 三设计上对长引出线的IO口没有保护,静电打在IO口上引起单片机死锁,破坏了硬件逻辑功能,导致死机。 四复位收到干扰,引起反复复位,在反复复位当中有可能会导致死机。 综上所述: 设计电路时,应该注意: 1.电源稳定 2.IO保护 3.振荡器pcb布线注意 4.复位电路设计和pcb布线 5.电源,信号线的干扰路径的保护,加滤波tvs等 6.高速信号输出远离信号输入端,如SPI总线,I2C总线布线要远离ADC,复位,时钟等布线处,以及
[单片机]
使用极海APM32F411系列MCU实现双电机精准控制
“双碳”目标的提出,令“高效节能”成为电机行业的主要发展方向,随着技术发展的日新月异,任何电机控制应用都在硬件与算法上不断寻求能效、可靠性与功能升级的突破,其中无感FOC控制算法转矩波动小、效率高、噪声小、动态响应快等优势明显,被广泛应用于控制BLDC电机和永磁同步电机的应用产品上,同时在空调、冰箱、无人机、伺服电机、机器人、汽车电机、燃料泵等众多应用中也能找到无感FOC控制的身影。 优秀的控制方案需要出色的算法,更需要具备高效运算及控制性能的主控芯片,极海近期推出高性能、高适配型APM32F411系列MCU,采用55nm工艺制程,搭载FPU浮点运算单元,具有高速运算能力、多种工作模式以及丰富的高精度外设和通讯接口,可以低成本
[嵌入式]
 完美图解物联网IoT实操 ESP8266 Arduino Cordova物联网移动App (赵英杰著)
完美图解物联网IoT实操 ESP8266 Arduino Cordova物联网移动App (赵英杰著) 寻迹电力电子 (陈武 编著)
寻迹电力电子 (陈武 编著) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用













 京公网安备 11010802033920号
京公网安备 11010802033920号