一、设备故障原由
事情是这样的,上周接到一个工作现场的咨询电话,反馈工作现场伺服定位不准,经过反复沟通与确定,可以梳理大致的故障现象为以下两点:
手动控制,只能接收一个步的脉冲。
自动控制,可以接收脉冲,但是在运行过程中会停顿,然后再运行。
二、故障原因分析
遇到这样的故障现象,还是挺有挑战性。从处理伺服设备故障的思路出发,一般分为四种:
1)硬件接线异常;
2)程序逻辑异常;
3)现场干扰问题;
4)人工操作不合规导致异常。
经过仔细询问得知,现场工程师反馈:“设备一直使用正常,近期也没有新添加什么设备,就是突然出现这种故障现象。”经过初步沟通,我这边给的初步处理思路是检查现场接线有没有异常,其次检查屏蔽线。挂完电话后,思路一直在为何设备能在自动情况下运行,但又卡顿。手动情况下,按下点动只能接一个步的脉冲。
不知诸位读者,有没有与我一样的疑问,也欢迎补充,伺服的工作原理是一个闭环控制的过程,上位机发多少个脉冲,伺服从A点到B点移动或水平或角位移。所以当时疑问有以下几点:
如果断线,那也不存在能自动,不能手动的现象;
如果是干扰,那也不存在干扰手动,不干扰自动,且现场工况不变的情况。
现场工程是检查了接线与上位机,发现PLC正常、接线正常、程序执行正常。伺服不报任何故障代码。
遇到这样故障,也忍不住主动打电话现场沟通,咨询有什么进展没有,有没有突破,现场反馈故障依旧没有处理。问到伺服的型号为英威腾SV-DA200交流伺服。挂完第二次电话后,搬救兵、查手册。
三、故障处理过程
看到这里的读者,我想您一定也有自己的处理的思路了。
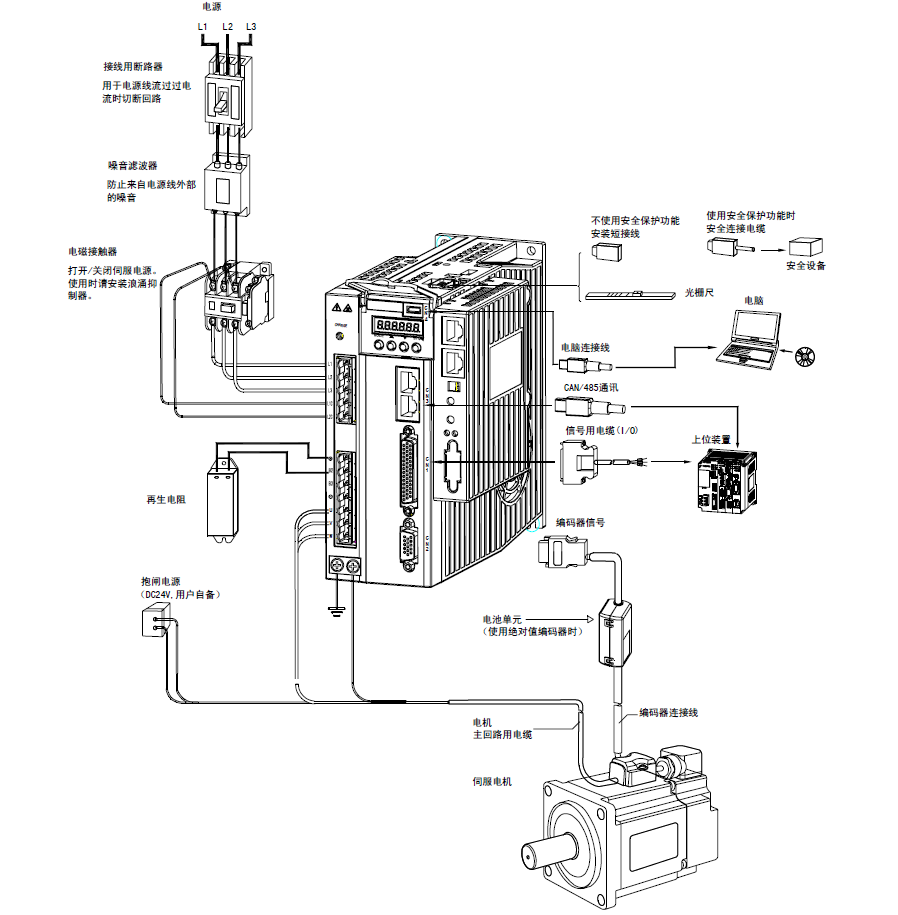
经过二轮电话沟通后,大致的问题可以锁定在伺服上,决定实际监控一下伺服驱动器到底有没有接收到脉冲。在英威腾SV-DA200驱动器手册两组参数分别为R0.02与R0.03,两组参数分别为反馈脉冲累积(理解为编码器实际检测的位置反馈)、指令脉冲累积(理解为驱动器从上位机接收的脉冲个数),通过这两组参数监测,果然发现在自动的情况下,伺服在伺服使能的状态下,上位机发脉冲,驱动器只能接收到一个步的脉冲个数。
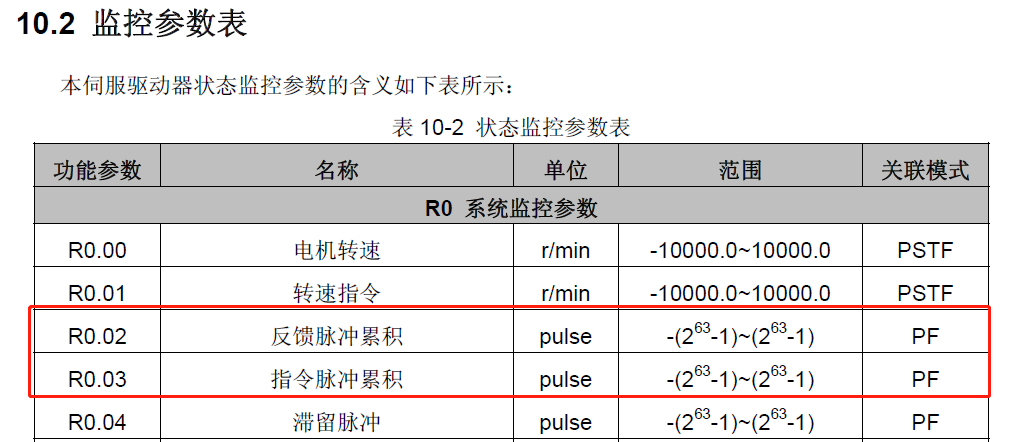
伺服驱动器参数监控表

伺服调试软件实际监测值
根据现场反馈的信息,故障现象可以锁定为硬件线路有问题,但是又迫于现场没有条件直接更换驱动器,检查PLC到驱动端线路正常,伺服电机到伺服驱动器端正常,最后怀疑可能CN1接口,直接建议现场在上级允许的情况下拆机。拆机后果然发现CN1的有一根引脚虚接,崩断的现象。重新焊接,上电设备正常,故障解除。



伺服驱动器驱动板

伺服驱动器接口维修的过程
四、反思总结
工控现场设备故障错综复杂,尤其是突发性的故障更是让人措施不急,因为现场英威腾的驱动板维修时没有拍照,上图为笔者在维修一台V90伺服的照片,也是因为检测不到脉冲,发现CN2管脚异常。伺服在现场使用非常广泛,CN1与CN2的管脚也容易发生问题,好在最后英威腾伺服经过焊接上锡后设备恢复正常,特将该故障整理成文,以飨食诸位读者,不足之处,欢迎斧正!
关键字:伺服 定位不准
引用地址:
伺服定位不准、丢步问题的解决办法分享
推荐阅读最新更新时间:2024-11-12 13:19
交流伺服系统ASDA-M系列提升龙门喷绘设备印刷质量和精细度
项目背景 随着社会的发展和进步,人们对高级且精致印刷品需求越来越多,特别是个性化需求的增加,让很多人不再对过去常见的照片、手机外壳、地板砖等印刷品感到满足,而是逐渐代之以个人写真、个性化外壳以及炫彩的地板砖等等(如图1所示)的高精度、高品质印刷类制品丰富我们的日常生活。 面对个性化产品的普及,龙门喷绘设备需求与日俱增。在印刷行业,印刷的质量和精细程度决定产品的档次,用户往往会在同一个喷绘设备上重复打样多次检验是否有重影以确定定位精度。针对产业需求,台达提供 交流伺服系统 ASDA-M系列 ,能提升印刷机的质量和精细要求,满足人们多样化的个性化需求。 图1 印刷类制品 项目方案 早期的喷绘设备(如图2所
[嵌入式]
拥抱工业4.0 ADI布局先进伺服控制市场
为了提高马达控制系统的节能效率,迎接即将到来的工业4.0,美商亚德诺(ADI)正积极布局中高阶马达控制市场,期望藉由先进的伺服控制系统解决方案,在快速成长中的市场抢占先机。 根据ADI亚太区马达与电源控制产业市场部经理于常涛表示,全球约有40%以上的电力消耗都来自马达,而随着马达系统革新,业界正持续更新整体控制与电力系统架构以提升节能效率,加上工业4.0正迈向智慧连网系统发展,预计即时乙太网路与更先进控制方案将成为未来五年的市场成长方向,而这也正是ADI 的投资重点。ADI目前正致力于规划相关产品,预计将在2017-2018年就会有更成熟的方案释出。 以中国制造2025计划为例,于常涛表示,在中国政府大力推动的这项计划中
[工业控制]
伺服电机分类及编码器工作原理
伺服电动机也称为执行电动机,在控制系统中用作执行元件,将输入的电压控制信号转换为轴上输出的角位移和角速度,以驱动控制对象。其最大的特点: 有控制电压时转子立即旋转,无控制电压时转子立即停转。转轴转向和转速是由控制电压的方向和大小决定的。 可分为两类:直流伺服电动机和交流伺服电动机
[嵌入式]

Trinamic推出多轴步进电机伺服模块
TMCM-3351是将已经成功上市十多年的TMCM351扩展到性能更加优越的步进伺服行列 TRINAMIC运动控制扩展了其TMCM嵌入式电机控制模块组合。继TMCM-351三轴电路板的成功之后,TMCM-3351的设计与TMCM-351一样易于使用,外形尺寸,接线方式完全不变,但具有附加的闭环步进电机伺服功能和先进的静音驱动功能。 新电路板驱动三个2相双极步进电机,最高可达2.8A RMS。 TMCM-3351利用Trinamic的最高性能步进电机驱动器集成电路(用于外部MOSFET TMC5160和专用闭环运动控制器TMC4361),是一款经济高效的步进电机伺服控制器,适用于具有A / B / N正交编码器的步进电机。
[工业控制]
IGBT7与IGBT4在伺服驱动器中的对比测试
【导读】IGBT7作为英飞凌最新一代IGBT技术平台,它与IGBT4的性能对比一直是工程师关心的问题。本文通过FP35R12W2T4与 FP35R12W2T7在同一平台伺服驱动中的测试,得到了相同工况下IGBT4与IGBT7的结温对比。实验结果表明,在连续大功率负载工况与惯量盘负载工况的对比测试中,IGBT7的结温均低于IGBT4。 伺服驱动系统响应速度快,过载倍数高,小型化和高功率密度的趋势更是对功率器件提出了更苛刻的要求。英飞凌明星产品IGBT7凭借超低导通压降、dv/dt可控、175℃过载结温、完美契合伺服驱动器的所有需求。英飞凌—晶川—迈信联合研发基于IGBT7的伺服驱动完整解决方案,可显著提高功率密度。驱动芯片采用英
[测试测量]
深度解析步进电机、伺服电机与机器人运动控制
作者 | Frank Lamb
运动控制和的故障排除和维护需要对和机器人中的所有组件和机制有深刻的了解。
运动控制涉及使用电机对执行器进行定位和精确移动。虽然运动控制并不总是闭环控制,但它不同于,后者的主要目标是实现并验证已知位置或运动。
01
的原理和维护
步进电机是一种无刷直流电机,其定子由多个围绕齿轮状转子排列而成。排列的磁体被分为不同的组,这就是相。每相同时通电,使电机“步进”到下一个位置。
基于的按适当的顺序激活驱动。典型的步进电机分辨率为每转200步,但使用“微步进”,可以实现每转1600步。步进驱动器有时也被称为“斩波器”。
步进电机通常在没有反馈设
[机器人]
步进电机开环伺服系统解析
步进电机伺服系统是典型的开环控制系统,指令信号是单向流动的。开环系统没有位置和速度反馈回路,省去了检测装置,其精度主要由步进电机来决定,速度也受到步进电机性能的限制,系统简单可靠,不需要像闭环伺服系统那样进行复杂的设计计算与试验验证。 步进电动机开环伺服系统由于具有结构简单、使用维护方便、可靠性高、制造成本低等一系列优点,在中小型机床和速度、精度要求不十分高的场合,得到了广泛的应用。 1.步进电动机的种类和结构 步进电动机的分类方式很多,根据不同的分类方式,可将步进电动机分为多种类型,如表1所示。 步进电机在结构上分为定子和转子两部分,现以图2所示的反应式三相步进电机为例加以说明。定子上有六个磁极,每个磁极上绕有励磁绕
[嵌入式]
三菱伺服电机编码器怎么调零
三菱伺服电机编码器调零是确保电机精确控制的重要步骤。本文将详细介绍三菱伺服电机编码器调零的方法和步骤,包括编码器的基本原理、调零的目的、调零的方法、调零的步骤、注意事项以及常见问题和解决方案。 一、编码器的基本原理 编码器是一种将机械位置转换为电信号的传感器,用于测量和控制电机的位置和速度。编码器通常由一个旋转的转子和一个固定的定子组成。转子上有一系列均匀分布的凹槽或凸起,而定子上有一系列光电元件或磁性元件,用于检测转子上的凹槽或凸起。当转子旋转时,光电元件或磁性元件会检测到凹槽或凸起,从而产生电信号。这些电信号经过处理后,可以转换成电机的位置和速度信息。 二、调零的目的 调零是将电机的初始位置设置为零点,以确保电机在启动
[嵌入式]








 伺服与运动控制系统设计 (田宇编著)
伺服与运动控制系统设计 (田宇编著) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用

















 京公网安备 11010802033920号
京公网安备 11010802033920号