0 引 言
天线是雷达的重要组成部分,天线方向图的测试在雷达性能测试中占有极其重要的位置。早期人们采用手动法进行方向图测量,数据的录取、方向图的绘制以及参数的计算都是手工方式,操作复杂,工作量大,耗时长,精度低。随着微电子技术和计算机技术的飞速发展,天线方向图自动测试逐渐取代了手动测量,实现了信号录取、数据处理以及方向图绘制的自动化,大大提高了测量速度和精度。本文介绍了一种雷达天线方向图的自动化测量系统,分析了软硬件结构及原理。
1 方向图自动测试原理及实验配置
根据天线的互易性原理,将被测天线作为接收天线,固定的辐射天线作为发射天线,由发射天线发射电磁波,转动被测天线进行接收,测出被测范围内不同角度处的信号电平,便可得到被测天线的方向图[1]。
方向图的自动测量与手动测量原理相同,不同的是利用电子和计算机技术,实现了数据采集、处理和方向图绘制的自动化。图1是某雷达天线方向图自动测试的实验配置。
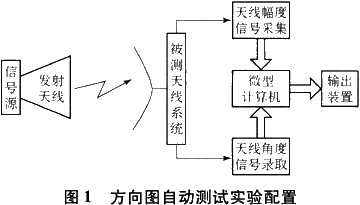
方向图的自动测量属于动态测量。测量时被测天线连续转动,并接收信号源通过喇叭天线发射的微波信号。接收信号送天线幅度信号采集电路,经变换放大及A/D转换后送给微机。天线转动的同时,天线角度信号录取装置将天线位置转换成角度数字信号送给微机。这样就可以得到测量范围内每一位置的幅度信号电平,根据这组数据,微机就可以进行数据处理并由输出装置输出计算结果。
2 硬件电路设计
系统硬件包括微机控制部分、天线幅度信号录取装置、天线角度信号录取装置和绘图仪。组成框图如图2所示。

2.1 微机控制电路
微机控制电路采用51系列单片机,由CPU、程序存储器、外部数据存储器和地址译码器等组成[2]。
2.2 天线幅度信号录取装置
幅度信号录取装置由测量放大器、采样/保持电路s/H和A/D转换电路组成。
天线接收的微波信号送至测量放大器,对微波信号进行高频检波,输出调制方波信号,然后进行放大、检波、滤波等处理,输出一个幅度满足要求、波形较好的直流信号。该信号经采样S/H后送到A/D,A/D在单片机控制下将模拟信号转换成数字信号,并存入外部数据存储器,从而完成幅度信号的录取。
测量放大器是该系统的信号变换放大电路,有较高的灵敏度、大的动态范围、稳定的工作特性和快的响应速度。
S/H的选取原则是:如果在A/D转换期间输入信号电平的变化小于1个LSB,可以不加S/H;否则,必须加S/H。下式是不加S/H时信号变化率应满足的关系:
式中: 为信号变化率的绝对值;Vm为A/D的满度电压;n为A/D的位数;T为A/D的转换时间。
为信号变化率的绝对值;Vm为A/D的满度电压;n为A/D的位数;T为A/D的转换时间。
A/D芯片采用AD574,其参数为:Vm=10 V,n=12,T=25μs,代入式(1)得 。雷达波束的最大变化率不小于10 V/(。),天线转速一般不小于2 r/min,信号电压变化率不小于:10 ×(2 × 360/60)=120 V/s,超过极限值97.7 V/s,所以必须加S/H。
。雷达波束的最大变化率不小于10 V/(。),天线转速一般不小于2 r/min,信号电压变化率不小于:10 ×(2 × 360/60)=120 V/s,超过极限值97.7 V/s,所以必须加S/H。
AD574具有量化误差小(2.44 mV)、动态范围大(72 dB)、转换速度高(25μs)等优点。
2.3 天线角度信号录取装置
天线角度信号的录取由单片机控制轴角编码器完成。轴角编码器直接从天线传动机构的同步接收机三相绕组和激励绕组上取信号,输出12位角度数字信号。与一般角度编码器相比,它采用跟踪型闭环回路,具有跟踪速度快、精度高等优点,其原理见图3。
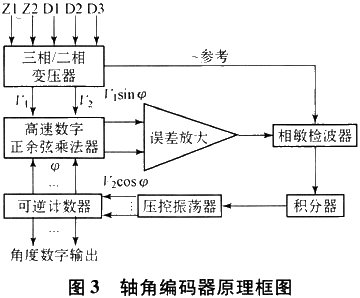
同步机上三相绕组的电压经三相/二相变压器得到两相电压V1和V2:![]()
式中:υm为电压幅值;ω为同步机绕组电压的角频率;θ为天线转过的角度。
V1和V2在正余弦乘法器中分别与cosφ和sinφ相乘(cos φ和sinφ是正余弦函数发生器产生的,φ为计数器的数字量),然后在误差放大器中进行相减、放大得:
式中:k为误差放大器的放大倍数。
该信号经相敏检波后输出误差信号θ-φ,再经积分器积分后控制压控振荡器使θ-φ趋于0,此时可逆计数器输出代表角度θ的数字量。
该轴角编码器可输出12位角度数字信号,具有很高的角度分辨力。从粗同步机上取信号时,最小可分辨角度为:6 000/212=1.46密位。为进一步提高分辨力,从精同步机上取信号,由于粗、精转速比为1:20,最小可分辨角可达到1.46/20=0.073密位。
采集间隔越小,测量精度越高,但最小采集间隔受天线转动速度、A/D转换时间和必要的数据处理时间的限制。本系统采用等角度间隔采集,采集间隔为23×0.073=0.58密位。
3 软件设计
3.1 软件构成及执行流程
系统的软件由信号采集、数据处理和方向图参数计算及绘图3部分组成。
信号采集程序包括幅度信号录取程序和角度信号录取程序,也就是A/D和轴角编码器的启动和数据输出程序。采集的天线幅度信号存入外部数据存储器;由于绘制方向图和参数计算只需角度的变化量,不需要角度的绝对值,因此,角度数字信号不必像天线幅度信号一样存放在存储器中,而是用存储器地址的后几位来代表角度信号,即存放某一位置幅度信号的地址,就包含了该位置的角度信息。这样处理既节省了存储空问,又使数据处理大大简化。
程序执行流程图如图4所示。

测量开始后,单片机根据轴角编码器输出的角度信号判断天线转过的角度是否为△α(相邻两数据点的角度间隔),如果还没有转过△a,等待;如果已转过△a,CPU发出"启动"A/D的指令,并将A/D转换结果存入外部数据存储器。这样,在单片机控制下,天线每转动△a录取一次天线幅度信号。录取结束后,进行数据校准、滤波处理和参数计算,最后绘制方向图,打印方向图参数。
天线方向图参数包括主瓣宽度、副瓣电平和交叉点电平。由于天线幅度信号采用对数值,因此乘除法运算变成了加减法运算,使编程简化。求解3个参数的关键是求出主瓣最大值点、第1副瓣最大值点和交叉点,找到这些点后再进行简单的加减运算即可求出参数值。下面介绍数据处理程序中的测量放大器校正程序和消"毛刺"程序。
3.2 测量放大器校正程序
测量放大器是该系统最主要的误差源,是一个近似的对数放大器,为了得到与输人信号对数成正比的输出电压,需对其进行校准。
本系统测量放大器的校正法是:用实验方法测出整分贝点校准值对应的测量放大器输出电压值,制成电压-分贝表存人程序存储器,编制查表程序可得到与整分贝点校正值对应的输出电压值,非整分贝点的校正值由线性插值法求出。计算公式为:
![]()
式中:i=1,2,…Y为整分贝校正值;X为对应Y的输出电压值;y为位于yi-1与Yi之间的非整分贝校正值;x为对应y的输出电压值。
电压-分贝表可通过下面的实验获得。实验配置如图5所示。
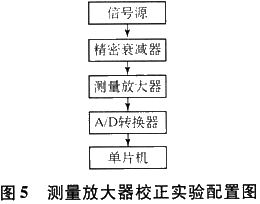
实验步骤如下:
a)按图5连接电路,打开电源,使仪器正常工作。
b)将精密衰减器调至0 dB,调整信号源"衰减"旋钮,使A/D输出接近满量程。
c)增大精密衰减器的衰减量,每变化1 dB读一次A/D输出值,直到输出为0。
d)以分贝值为地址(末几位),在EPROM中固化相对应的A/D输出值。
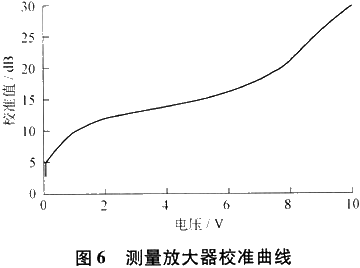
图6是由绘图仪绘制的测量放大器的校准曲线。实验表明,经校准后,测量放大器产生的误差大大降低,但仍大于0.25 dB,信号较小时误差接近0.5 dB。误差产生的原因是校准时精密衰减器本身有0.1 dB的误差,尤其是校准时的环境(温、湿度等)与测量时不同造成的校准误差影响更大。因此,实际中一般制作多个分贝-电压表,应用于不同的实验环境。
3.3 消除"毛刺"程序
由于电磁环境日趋复杂、恶劣,测试现场存在很多电磁干扰。出现最频繁的是脉冲干扰,在绘出的方向图中表现为一个个小"毛刺"。这些毛刺给数据处理带来很大麻烦,如果不予消除,可能引起测量误差增大、参数计算出错等现象。例如出现在主瓣上的"毛刺"会被误判为副瓣,从而导致副瓣电平的计算出错。
常用的消除"毛刺"方法有限幅滤波法、求算术平均值法、中值滤波法和一阶滞后滤波法等。通过实验验证,限幅滤波法对测量中出现的"毛刺"的滤波效果最好。限幅滤波法是把两次相邻的采样值相减,求出增量绝对值,然后与两次采样允许的最大差值△Y进行比较,如果不大于△Y,则认为本次数据有效,保留该数据;否则,取上点的数值作为本次数据。即
式中:K=1,2,…;X为采集数据;Y为滤波数据。
△Y的选取至关重要,过大和过小其滤波效果都不理想,需通过反复实验获得。
4 结束语
本文介绍了某雷达天线方向图自动测试系统的软硬件原理。用该系统进行实地测量,不计架设和通电准备时间,从信号录取、数据处理到最后绘制方向图、打印计算结果,整个测试过程不超过1.5 min。该系统具有精度高、测量速度高、性能稳定、价格低廉和适应环境能力强等特点,既适用于实验室的测量,又适合在野外工作现场对天线进行在线测量。
上一篇:802.16/WiMax组网关键技术探析
下一篇:噪声恒虚警处理电路的计算机仿真
推荐阅读最新更新时间:2024-05-07 15:59

 整车控制策略开发需求分析及新能源汽车动力总成测试系统
整车控制策略开发需求分析及新能源汽车动力总成测试系统- Wi-Fi 8规范已在路上:2.4/5/6GHz三频工作
- 治理混合多云环境的三大举措
- Microchip借助NVIDIA Holoscan平台加速实时边缘AI部署
- 是德科技 FieldFox 手持式分析仪配合 VDI 扩频模块,实现毫米波分析功能
- 高通推出其首款 RISC-V 架构可编程连接模组 QCC74xM,支持 Wi-Fi 6 等协议
- Microchip推出广泛的IGBT 7 功率器件组合,专为可持续发展、电动出行和数据中心应用而设计
- 英飞凌推出新型高性能微控制器AURIX™ TC4Dx
- Rambus宣布推出业界首款HBM4控制器IP,加速下一代AI工作负载
- 恩智浦FRDM平台助力无线连接






- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- 左手车钥匙,右手活体检测雷达,UWB上车势在必行!
- 狂飙十年,国产CIS挤上牌桌
- 神盾短刀电池+雷神EM-i超级电混,吉利新能源甩出了两张“王炸”
- 浅谈功能安全之故障(fault),错误(error),失效(failure)
- 智能汽车2.0周期,这几大核心产业链迎来重大机会!
- 美日研发新型电池,宁德时代面临挑战?中国新能源电池产业如何应对?
- Rambus推出业界首款HBM 4控制器IP:背后有哪些技术细节?
- 村田推出高精度汽车用6轴惯性传感器
- 福特获得预充电报警专利 有助于节约成本和应对紧急情况




 京公网安备 11010802033920号
京公网安备 11010802033920号