1 引言
无线电高度表不仅可以精确测量飞行器与地面或海面的相对高度,而且还可以测量地表 粗糙度、海洋波浪高度等多种参数,在飞机的自动着陆、自动导航、地形匹配等领域得到了 广泛的应用。无线电高度表主要分为调频连续波体制和脉冲体制两种,调频连续波体制适合 1500m 以内的低高度应用,脉冲体制适合1500m 以上的中高高度应用。本文介绍了一种基于 FPGA/MCU 结构的线性调频(LFMCW)连续波高度表,具有精度高,结构简单,可靠性高,成 本低等特点。
2 工作原理
线性调频连续波高度表的基本原理为[2]:采用三角波线性调频微波振荡源,经发射天线 辐射等幅调频波,经过与飞行器飞行高度成正比例的时间延迟τ,由地面发射并被接收天线接 收,经混频后输出差拍信号fb,该信号经窄带滤波器选频后,被一个增益随高度变化的放大 器放大、滤波,送到跟踪鉴频器。跟踪鉴频器输出高、低电平表示差拍信号是否进入跟踪带 内,控制单元根据保持或调整三角波的斜率,使差拍信号始终落入跟踪带内,保持恒定值。 整个系统通过地面构成闭环,飞行器的高度由三角波的斜率和最大频偏Δf 来决定。
其主要性能指标为:
工作频率:C 波段
体制:LFMCW(线性调频连续波)
测高范围:0?1500m
距离分辨率:1m
高度数据接口:RS422,9600 波特率
该高度表属于收发天线分开、三角波调频、频谱前沿跟踪、恒定差拍式无线电高度表,其工作原理如图1 所示。
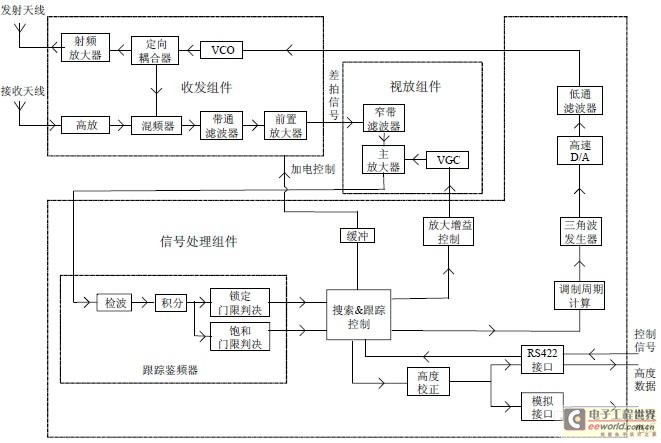
图1 线性调频高度表工作原理图 上图中,三角波发生器输出信号的幅度是一个常数,而其斜率是控制电压的函数。在测 高过程中,通过测高回路自动校正,使调制信号的斜率随高度而变化,以保持差拍恒定。变 化规律是高度升高,斜率增大;高度降低,斜率减小。跟踪鉴频器判别差拍信号fb 是否进入 跟踪带内,如是则输出锁定信号。跟踪鉴频器的中心频率为225kHz,带宽仅为30kHz 左右, 使高度表有较高的抗噪声和抗干扰的能力。在没有跟踪锁定信号时,高度表进入搜索状态, 变化三角波的斜率,从最低高度到限制的最高高度周期地扫描,并根据跟踪鉴频器是否输出 锁定信号进行调整。当调制斜率对应飞行高度时跟踪鉴频器输出高电平,高度表环路锁定并 保持跟踪地面发射的信号。
接收、发射天线选用微带集成平板天线,天线间距不小于1m,使收发隔离度大于70dB。 天线的3dB 带宽为300MHz,旁瓣电平不大于-12dB,驻波比S=2,效率η≈80,总尺寸不大于 15cm×15cm。
收发组件采用自差结构,输出为零中频的差拍信号,其频率跟地面高度成正比。VCO 的 调制带宽最高可达200MHz,调制线性度优于1.2。组件的接收增益30dB,噪声系数3.5dB。 视放组件对差拍信号进行选频放大,总增益不低于80dB,增益控制范围不低于90dB。
选频滤波器为定制的机械滤波器,中心频率225kHz,带宽30kHz。主放大器选用AD 公司的视 频放大器AD*,它内部集成了两个放大器模块,可以单独使用其中的任何一个或将两个级 联使用以提高增益和扩大动态范围,每个放大器模块的增益最大可达54.4dB,增益控制范围 48.4dB。[page]
3 信号处理组件
3.1 硬件设计
信号处理组件完成地面高度的搜索/跟踪、AGC、STC 等功能,其电路框图如图2 所示, 核心是1 片FPGA 和1 片MCU,通过软件算法实现大部分信号处理功能。
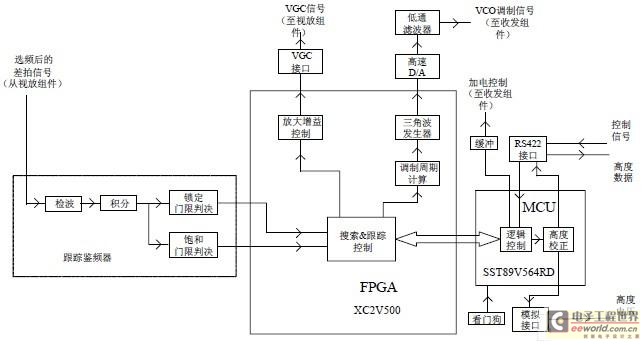
图 2 信号处理组件电路框图
地面高度的搜索/跟踪是FPGA 和MCU 根据锁定门限判决电路的输出状态,按一定算法改 变VCO 调制信号的频率,使差拍信号落入225kHz 的跟踪带内。在地面高度的搜索过程中,VGC 电压与高度的对数呈线性关系,从而实现STC(时间-灵敏度控制)功能。在地面高度的跟踪 过程中,VGC 电压受控于饱和门限判决电路的输出状态,饱和时减小VGC 电压,直到差拍信 号的强度低于饱和门限,降低地面回波强度对测高精度的影响,从而实现AGC(自动增益控 制)功能。
FPGA 选用Xilinx 公司的XC2V500[4],完成高速信号处理算法的运行,如VCO 调制信号 的产生、VGC 控制电压的生成、搜索/跟踪的控制等。外围的高速D/A 采用AD 公司的AD9754AR, 40MSPS 采样率,14 位分辨率,能满足VCO 调制信号对其线性度的要求。AD9754AR 采用差分 电流输出接口,以抑制共模干扰,通过运放将电流转换成电压输出。
VGC 接口采用D/A 转换器和运放,来产生精密的VGC 电压,VGC 电压的输出范围为0?9V。 D/A 转换器选用并行12 位D/A 转换器AD7392AR,速度比较快。
MCU 选用SST 公司的8 位单片机SST89V564RD[5],64K Flash 编程空间,完成高度表状态 的控制、高度数据的校正/补偿等工作。RS422 接口采用MAXIM 公司的AD844E,全双工工作, 既可输出地面高度数据,也可通过该接口实现SST89V564RD 的在线编程和在线仿真。
MCU 与FPGA 之间采用8 位的数据/地址复用总线接口,速度快,通过访问特定地址的寄 存器来实现逻辑控制和数据的读取。SST89V564RD 的工作电压为3.3V,可直接与FPGA 进行通 讯,不需进行电压转换。
3.2 软件设计
该高度表的软件设计包括两部分:一部分是FPGA 的编程,采用VHDL 语言编写;另一部 分是MCU 的编程,采用汇编语言编写。两部分软件共同实现高度表的搜索、跟踪等功能。
a. 搜索算法
当高度表的差拍信号未落入225kHz 的跟踪带内时,高度表进入搜索状态:通过改变调 制频率fm从低高度到高高度进行搜索。fm的值是离散的,满足fm=112.5kHz/n,n 为分频系数, n=1?1500(正整数)。
采用了线性搜索算法,分频系数n 从小到大连续变化,使高度表从低到高,以距离分辨 率Δh=1.0m 为步长连续搜索,即fm=112.5kHz/n,n=1→1500。当差拍信号fb0=225kHz±15kHz 时,锁定门限输出高电平,高度表进入跟踪状态,由跟踪鉴频回路与地面组成闭环系统,伺服于高度的变化。
b. 跟踪算法
当高度表进入锁定状态时,由跟踪鉴频回路与地面组成闭环系统。由于线性调频信号的 特殊性,其谱线是离散的,当高度变化时,各个频率成分的信号都有,只是各个谱线的幅度 不同。在低高度上,由于跟踪带宽很窄(30kHz),调制频率变化量Δfm大于30kHz 时,造成 高度表失锁。另外,由于面目标的回波差拍信号的能量并不是集中在一根谱线上,而是多根 谱线或谱线带具有相同量级的回波能量,要使高度表能跟踪到最低谱线,即最低高度,要采 用具有频谱前沿跟踪能力的算法。
我们设计了误差抖动跟踪算法,具有频谱前沿跟踪能力,其基本思路为:在当前跟踪高 度上产生一个误差搜索区域,在此区域内从低到高进行线性搜索,使高度表出现失锁→锁定 的状态变化,从而跟踪到最低高度。[page]
n 为当前高度所对应的分频系数,误差量Δn 取为5(对应的高度误差量为±5m),在(n- Δn)→(n+Δn)范围内从低到高进行搜索。如n 小于6,则从1→(n+Δn)进行搜索。如 该误差搜索区域内的最小n 值都能满足锁定条件,则以该最小n 值为当前n 值,再产生误差 搜索区域进行跟踪。如在整个误差搜索区域内都未出现锁定信号,高度表从跟踪状态转为搜 索状态。 误差抖动跟踪算法的流程图如图3 所示。
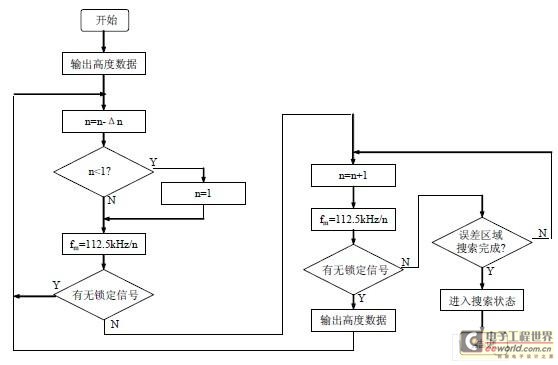
图 3 误差抖动跟踪算法的流程图
4 飞行试验
该高度表采用动力滑翔机,进行了多个架次的飞行试验,飞行地貌有城市、田地、树林、 水面等,最高飞行高度超过1500m。试验过程中高度表性能稳定,数据完整,50m 以下高度的 测高精度可达1m。
5 结束语
本文介绍了一种新型调频连续波高度表,主要创新点在于:采用了FPGA/单片机的硬件 平台,通用性强,并具备现场软件升级能力;通过软件算法实现了高度搜索、高度跟踪、STC、 AGC 等功能,改变信号处理算法和控制软件能实现多种功能,满足更多应用场合的需要;采 用恒定差拍结构,抗干扰能力强,并具有频谱前沿跟踪能力;具有0?1500m 的大范围测高能 力,在低高度上具有1m 的测高精度。
该高度表已用于某型无人机,创造经济效益50 万元。
上一篇:IDT 推出 Serial RapidIO Gen2 系统建模工具
下一篇:基于PC104总线的2FSK调制器的设计与实现
推荐阅读最新更新时间:2024-05-02 21:01

 新能源汽车核心技术详解:电池包 BMS VCU MCU
新能源汽车核心技术详解:电池包 BMS VCU MCU 21年电赛题目合集
21年电赛题目合集







- 首都医科大学王长明:针对癫痫的数字疗法已进入使用阶段
- 非常见问题解答第223期:如何在没有软启动方程的情况下测量和确定软启动时序?
- 兆易创新GD25/55全系列车规级SPI NOR Flash荣获ISO 26262 ASIL D功能安全认证证书
- 新型IsoVu™ 隔离电流探头:为电流测量带来全新维度
- 英飞凌推出简化电机控制开发的ModusToolbox™电机套件
- 意法半导体IO-Link执行器电路板为工业监控和设备厂商带来一站式参考设计
- Melexis采用无磁芯技术缩小电流感测装置尺寸
- 千丘智能侍淳博:用数字疗法,点亮“孤独症”儿童的光
- 数药智能冯尚:ADHD数字疗法正为儿童“多动症”提供更有效便捷服务
- Vicor高性能电源模块助力低空航空电子设备和 EVTOL的发展




 京公网安备 11010802033920号
京公网安备 11010802033920号