0 引言
在电机的闭环控制系统中,由于需要实时获得电机的位置和转速信息,高速、高精度的传感器以及相应的处理电路是必不可少的。光电编码器输出数字信号,容易实现高分辨率、高精度的检测,在现代电机检测技术中得到了广泛的应用。TI公司2000系列的DSP是目前控制领域最先进的处理器之一,其最新产品的工作频率高达150MHz,大大提高了控制系统的控制精度和实时处理信息的能力,其特有的QEP电路和光电编码器的配合使用为电机位置和转速测量提供了完美的解决方案。
1.DSP/QEP电路简介
以TI公司控制领域最新产品TMS320F2812为例,它的正交编码脉冲(QEP)电路和捕获单元共用输入引脚,分别为CAPl/QEPl、CAP2/QEP2、CAP3/QEPIl(对于EVA),CAP4/QEP4、CAP5/QEP5、CAP6/QEPI2(对于EVB),可以通过设置相应的捕获单元控制寄存器使能QEP电路而禁止其捕获功能。QEP电路可以对固定在电机轴上的光电编码器产生的正交编码脉冲A、B路信号进行解码和计数,从而获得电机的位置和速率等信息。
光电编码器的正交编码脉冲输入到DSP的CAPl/QEPl、CAP2/QEP2脚,通常选择通用定时器T2(EVA)对输入的正交脉冲进行解码和计数。要使QEP电路正常工作,必须使T2工作在定向增/减模式,在此模式下,QEP电路不仅为定时器T2提供计数脉冲,而且还决定了它的计数方向。QEP电路对输入的正交编码脉冲的上升沿和下降沿都进行计数,因此对输入的正交编码脉冲进行4倍频后作为T2的计数脉冲,并通过QEP电路的方向检测逻辑确定哪个脉冲序列相位超前,然后产生一个方向信号作为T2的方向输入,当电机正转时,T2增计数,当电机反转时,T2减计数。正交编码脉冲、定时器计数脉冲及计数方向时序逻辑如图1所示。

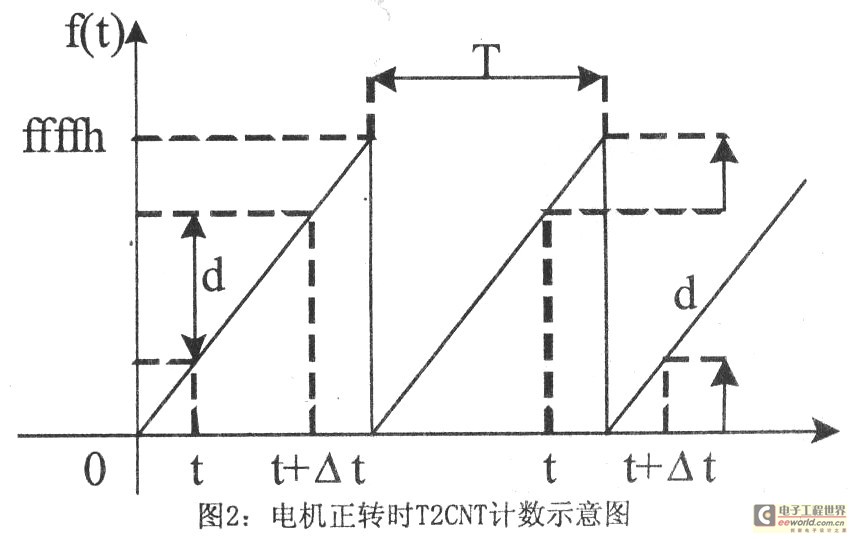
在QEP模式下,T2CNT计数到边沿时将自动翻转,当增计数到ffffh时将返回0重新开始增计数,当减到O时,翻转到ffffh重新开始减计数,由于在采样时间内计数脉冲的数目远小于T2CNT的周期数ffffh,所以在增/减计数过程中至多有一次翻转.,图2和图3分别描述了电机正转和反转时T2CNT的计数情况。
2.光电编码器和DSP的接口电路
光电编码器可以输出3路信号,其中A路和B路信号相位相差90°,光电编码器的输出的脉冲信号经过光电隔离、滤波整形后直接送到DSP的相应引脚,其接口电路如图4所示。其中6N137是高速光耦,实现模拟信号和数字信号的隔离,74Hel4是CMOS反相器,实现对信号的整形。


3.电机位置测量
DSP/QEP电路将编码器送过来的脉冲数转换为绝对的转子轴机械位置,绝对的转子轴机械位置将存放在变量θm中。通过每一次采样周期△t内T2的计数脉冲的改变量δ,可以得到相应的位置增量△θm。如上图所示:f(t)和f(t+△t)分别表示两次相邻采样时刻的值,那么在△t时间内电机转子旋转的机械角度为:

其中:P为电机旋转一尉T2CNT的脉冲计数值
如图2所示:当T2增计数无翻转时,δ=f(t+△t)一f(t)当T2增计数有翻转时,δ=f(t+△t)-f(t)65536,此时θm=θm+△θm
如图3所示:当T2减计数无翻转时,δ=-[f(t+△t)一f(t,)]当T2减计数有翻转时,δ=-[f(t)一f(t+△t)+65536],此时θm=θm-△θm
4.电机转速测量
常见的电机测速方法主要有三种:M法、T法、和M/T法,由于M法比较适合高速的场合,而T法适合低速的场合,为了在整个调速范围内都得到较好的准确性,在这里我们选择M/T法,其原理如图5所示。

M1为测速脉冲计数值(对应前面的δ),M2为高频时钟脉冲计数值,△t为采样周期,虽然在M1个计数脉冲内,M2存在多一个少一个的误差,但由于时钟脉冲的频率远高于计数脉冲频率,引起的误差可以忽略,所以转速的计算公式为:

其中F为时钟脉冲的频率
5. 结束语
本文利用光电编码器和DSP/QEP电路实现了电机闭环控制系统转子位置及转速的测量,并在电机的仿真试验中得了较好的效果。实践证明,光电编码器和DSP/QEP的配合使用有利于提高伺服系统的控制精度,并为不同控制领域提供了高性能的数字解决方案。
引用地址:
电机位置检测和转速测量研究
推荐阅读最新更新时间:2024-03-30 22:19
多核DSP提升RNC分组处理能力
由于与频率提高相关的功耗/散热问题日益突出,指令级并行架构(ILP)及存储能力已近极限,硅芯片已难以支撑处理器性能的大幅度提升。在单芯片上集成多个核,每个核同时处理多条线程而非不断提高处理器时钟速度,已是业界共识。TI认为,通过改进无线网络控制器(RNC)的分组处理功能,是满足无线网络数据及语音流量大幅增长以及应用多样性需求的可行之道。 基站控制器(RNC)直接影响到移动用户的通话和使用效果,为此,TI 采用多核DSP替代以往由通用处理器和RISC执行的功能,开发出一套可进行高效分组处理的低成本方案TMS320TCI6486,从而在不额外增加RNC的情况下实现网络优化。TI高密度与核心基础局端DSP产品全球业务总经理Joh
[嵌入式]

有关于DSP的历史,现状以及发展趋势
DSP市场拓展纵横谈 在经历整整二十年的市场拓展之后,DSP所树立的高速处理器地位不仅不可动摇,而且业已成为数字信息时代的核心引擎。与此同时,DSP的市场正在蓬勃发展。根据Forward Concepts 分析家的预测,今年全球DSP销量将达到$82亿美元,比去年增加约三分之一。而对于2004年和2005年的预测值,则分别是$108亿元和$140亿元,并预言未来几年DSP都将以每年超过30%的速度成长。根据CCID权威的分析,中国DSP市场今年可达到120亿元人民币,比去年增长约40%,未来的增长将可能超过全球的平均速度。 对于DSP市场的高速增长,许多人充满着浓厚的兴趣。本文将结合DSP纵向的发展历程和横向的拓展方向进行探讨,以
[新品]
基于DSP的双足机器人运动控制系统设计
近年来,仿人机器人一直是自动控制领域研究的热点。在模仿人类进行迈步行走时,由于仿人机器人的重心经常要处于中心线以外的区域,使得它的身体很难保持站姿平衡,能够稳定地实现双足行走是仿人机器人研究的重点也是难点。人类需要大脑和肢体的相互配合来协调动作,机器人需要的则是运动控制器和驱动装置的强大支持,尤其是运动控制器,需要有高效率的芯片为基础,才能最迅速地采集数据、完成计算和发送指令。在本次设计中机器人关节使用的是大功率三相无刷直流电机,控制器采用TMS320F2812芯片,它是TI公司推出的一款针对控制领域做优化配置的数字信号处理器,器件上集成了多种先进的外设,为电机高速度和高精度控制提供了良好的平台。 1 系统概述
[嵌入式]
ARM/DSP双核系统的通信接口设计
引 言
嵌入式系统的核心是嵌入式微处理器和嵌入式操作系统。早期的嵌入式系统硬件核心是各种类型的8位和16位单片机;而近年来32位处理器以其高性能、低价格,得到了广泛的应用。近年来,又出现了另一类数据密集处理型芯片DSP。DSP由于其特殊的结构、专门的硬件乘法器和特殊的指令,使其能快速地实现各种数字信号处理及满足各种高实时性要求。随着现代嵌入式系统的复杂度越来越高,操作系统已成为嵌入式系统不可缺少的部分。免费的嵌入式操作系统,如Linux等,随着自身不断的改善,得到了飞速的发展。Linux是一个免费的、强大的、可信赖的、具有可伸缩性与扩充性的操作系统。Linux实现了许多现代化操作系统的理论,并且支持完整的硬件驱动程序、网络通
[工业控制]
基于DSP和ARM的激光粒度仪关键电路设计
O 引言 激光粒度仪是一种最先进的、最具有广泛发展前景的粒度测量仪器,它的测量原理基于米氏(Mie)散射理论。Mie散射理论是一个经典的光散射理论,它最大的特点是可用于任何尺寸段颗粒的测量,但它的计算相当复杂限制了数据处理速度及精度。 DSP技术实现MIE散射算法有很多优点:它是专为算法计算而设计的专用CPU,所以它运算速度很快;与通用CPU相比它成本低,所以有很好的性价比;而且它的体积小,能实现仪器一体化等等优点。ARM具有丰富的片上资源,适合嵌入式系统的开发,主要负责操作系统的运行、任务管理和协调以及DSP的控制任务,外部可扩展多种外设,如通用串口、LCD显示屏、以太网接口。 1 系统总体设计及工作原理 1.1 激光
[单片机]
基于DSP的覆冰机器人控制系统研究
DSP(digital signal processor)是一种独特的微处理器,是以数字信号来处理大量信息的器件。其工作原理是接收模拟信号,转换为0或1的数字信号。再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。它的强大数据处理能力和高运行速度,是最值得称道的两大特色。 覆冰和积雪等原因时刻威胁着电力及通信网络的安全运行 。覆冰机器人是针对去除输电线路覆冰的自动化装置。该机器人需要对行走电机、关节电机以及夹抓加紧电机等多种电机进行伺服控制。电机的种类
[工业控制]
ADI公司的DSP为电动和混合动力汽车产生内外发动机声音
Analog Devices, Inc. ( ADI )今天推出一款嵌入式系统,用于为电动(EV)和混合动力汽车(HEV)产生发动机声音。通过采用A DSP -BF706数字信号处理器和电动汽车警示音系统(EVWSS)固件,北美和全球其他地区的汽车制造商能够满足电动和混合动力汽车低速行驶时对外部发动机声音的未来安全规范要求。 ADI公司的DSP为电动和混合动力汽车产生内外发动机声音 查看EVWSS产品页面:http://www.analog.com/pr0717/evwss 在www.analog.com/cn/srf提交申请,以下载EVWSS固件。请在软件申请表的其他备注字段输入EVWSS.2.0.
[嵌入式]
嵌入式DSP上实现FlexRay总线的方法
摘要 研究基于MFR4200的FkxRay总线在嵌入式数字信号处理器OMAP5912上的实现。整个系统以DSP为核心,采用Freescale公司的MFR4200总线控制器实现FlexRay通信协议,进行数据收发。系统制造简单,集成度高,适用于车内多种电子设备的局域总线实现。 关键词 FlexRay总线 MFR420O OMAP5912 引 言 FlexRay总线是最近推出的一种采用点对点(星型拓扑结构)连接,借助无屏蔽或屏蔽双绞线电缆的先进高速串行同步和异步通信系统。FlexRay总线具有故障容限,可提供500kbps~10 Mbps的确定数据传输速率和24位CRC(循环冗余)校验码。FlexRay是一种时间触发型总线
[嵌入式]







 智能仪器设计基础 (王祁)
智能仪器设计基础 (王祁) 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练










 京公网安备 11010802033920号
京公网安备 11010802033920号