通过采样电压与电流的乘积并进行平均处理可以完成60Hz电路的平均功耗测量(相当于VRMS × IRMS × cos(φ))。这里要用四象限乘法,因为瞬时电压和电流可能具有相反的极性。它有很多种实现方法,包括模数(A/D)转换+数字信号处理,或者使用相对昂贵的模拟乘法器芯片+模拟或数字处理。本设计实例介绍了第三种方法。这种方法使用便宜的运放和模拟开关实现脉冲宽度/脉冲幅度调制器(PWM/PAM)并将它用作四象限乘法器。这种电路经过修改可以用于许多不同的应用。
PWM/PAM乘法器的基本概念是,一个(非重叠)脉冲波形在单个周期内的平均值等于脉冲面积除以脉冲重复周期。由于每个矩形脉冲幅度正比于电压值,宽度正比于电流,矩形面积正比于电压与电流的乘积。如果脉冲重复速率远高于被测频率,那么就可以假设在脉冲波形的一个周期内电压和电流不会有明显的变化。PWM/PAM输出连到一个低通滤波器,用于滤除脉冲频率及其谐波,并恢复出想要的平均值。
电路共使用了两个变压器:一个是降压变压器TR1,用于产生低电平的电压信号;另一个是电流变压器TR2,用于产生低电平的电流信号,并具有完全的电流隔离。
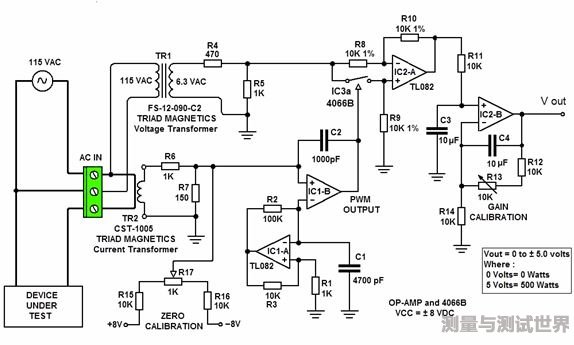
图1:使用脉冲调制技术测量交流功耗。
运放IC1-A用作比较器,产生频率约为6kHz且相当线性的三角波(图2)。为了取得低于满刻度1%的误差,这种过采样是必须的(100乘以60Hz信号频率,或50乘以理论上的奈奎斯特频率)。三角波的峰峰幅度必须满足两个条件才能获得可接受的线性响应。首先,它必须大于或等于T2产生的交流电流最大峰峰值电压,这样才能实现100%的PWM占空比。其次,它必须至少比±VCC低10%。
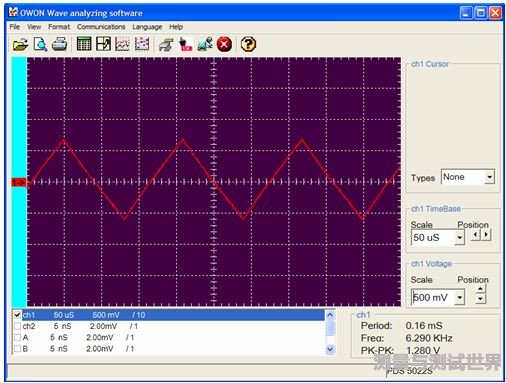
图2:IC1-B(-)输入。
运放IC1-B被配置为产生零基线的双极方波(图3),其占空比取决于T2产生的电流信号的瞬时值。电容C2用于获得陡峭的输出电压转换。运放的压摆率必须大于等于10V/μs,以便产生最优的方波PWM信号。当T2产生的瞬时电流信号值为0时,IC1-B将输出占空比为50%的信号。随着电流信号从0增加到满刻度,占空比随之从50%增加到100%。当电流信号从0降低到负的满刻度时,占空比将从50%减小到0%。
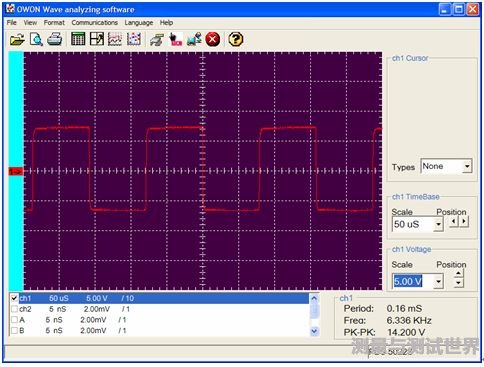
图3:IC1-B输出。
运放IC2-A、开关IC3-A和相关的电阻实现了一个四象限乘法器,实现形式相当于增益为+1(开关闭合)或-1(开关断开)的放大器。开关由IC1-B的PWM输出进行控制。当IC1-B的输出为正时,开关闭合;当IC1-B的输出为负时,开关断开。从IC2-A产生的输出(图4)是IC1-BPWM输出的复制(占空比正比于电流),除了幅度正比于电压外。
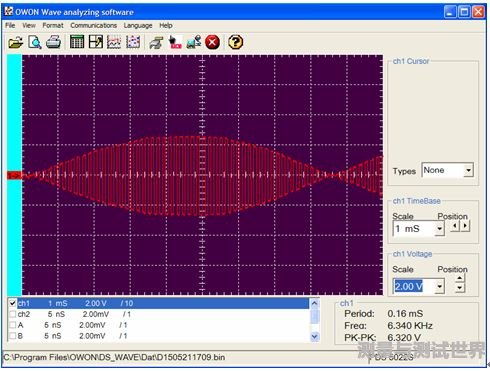
图4:IC2-A输出。
IC2-B是电路的最后一级,是一个低通滤波器,用于移除6kHz的PWM频率及其谐波以及60Hz调制信号。它的输出正比于PWM信号的平均值,因此就是平均的60Hz功耗值。
引用地址:
使用PWM和PAM测量电路的交流功耗
推荐阅读最新更新时间:2024-03-30 23:19
飞思卡尔那些事之pwm输出控制伺服电机转向
资源: 1、伺服电机。PWM输出周期在一定范围内,舵机的转向会和PWM的占空比成正比例关系。 2、HCS12的PWM输出。 方案: 1、HCS12中的PWM模块,通过硬件进行PWM输出。 2、HCS12中的ECT的比较输出模块,通过比较输出进行PWM的输出。 鉴于PWM模块为输出PWM专用模块,通过设置相应寄存器即可实现PWM输出,简单方便,而且精确。故选用PWM模块进行PWM输出。 说明: 1、通过PWM控制舵机的转角,舵机接口一般为3根线,黑色地线,红色为电源线,一般采用4.8V和6V两种标准。另外一根线为控制信号线。 2、通过级联方式实现16位PWM输出。 3、周期为18MS~20MS即输出周期为56Hz~50Hz。 4、对齐
[单片机]
配置STM32的PWM输出时没有波形输出的问题
以前在组织代码的时侯都是在初始化系统时钟时就一并初始化了各个外设,如 端口、定时器、串口等, 今天突发奇想,将各外设的初始化放到各外设的模块中去,这样的话没用到的外设就可以不用给时钟,降低能耗。 就这样问题出现了,PWM输出时没有波形输出。 反复检查对比了定时器的功能模块配置、输出IO的设置、RCC配置等,一直没有找到原因。 在准备放弃的时侯,有一搭没一搭的扫代码,突然一看,在设置输出IO代码之前没有给输出IO配置时钟,是在后配置的。 是不是这里的问题呢, 马上试试,果然。 这一记当头棒喝!! :) 所以, 在配置输出IO之前就要先配置IO时钟,谨记之!
[单片机]
stm32 timer1/pwm 笔记
//--------------------------------TIMER1 先说下RCC时钟 //-------------------------RCC(具体参考所用芯片) AHB所连接的时钟 * RCC_AHBPeriph_DMA1,RCC_AHBPeriph_DMA2,RCC_AHBPeriph_SRAM * RCC_AHBPeriph_FLITF,RCC_AHBPeriph_CRC,RCC_AHBPeriph_FSMC * RCC_AHBPeriph_SDIO APB1所连接的时钟 * RCC_APB1Periph_TIM2, RCC_APB1Periph_TIM3, RC
[单片机]
PIC16F877的Timer2与CCP模块的PWM
Timer2是一个8位定时器,带有一个预分频器、一个后分频器和一个周期寄存器。当将预分频器和后分频器设置为最大值时,其溢出时间与 16位定时器的相同。在PWM模式下使用 CCP模块时, Timer2 为PWM时基。 下图显示了Timer2的结构框图。后分频器对TMR2寄存器和PR2寄存器的匹配次数进行计数。这样有助于减少中断服务程序的调用频率,优化CPU性能。 与Timer2有关的寄存器 PWM模式 在脉冲宽度调制(PWM) 模式下,CCPx引脚可输出分辨率高达10位的 PWM 输出。因为CCPx引脚与端口数据锁存器是复用的,所以相应的TRIS位必须清零以使CCPx引脚为输出状态,下图为PWM结
[单片机]
MC9S12G128 PWM
/***************************************************************** ** 程序名:MC9S12G128 PWM ** 参 数:无 ** 功 能:初始化G128PWM,频率,16KHz,占空比50% ** 注 意:总线时钟需超频至32MHz ** 作 者:赵露露 ** 版 本:v1.0 ** 时 间:2012.5.11 ******************************************************************/ #include hidef.h /* common defines and ma
[单片机]

滤波器对PWM变频调速电动机端子上电压波形的影响
1引言 随着微电子技术和现代控制理论在交流变频调速系统中的应用,变频器(或逆变器)的性能也得到飞跃性的提高,并越来越广泛地应用于工业生产和日常工作的许多领域之中。但是,变频器输出的具有陡上升沿或下降沿的脉冲电压却在电动机接线端子及绕组上产生了过电压,造成电动机绕组绝缘的过早破坏。试验研究表明,很高的电压上升率(dv/dt)在电动机绕组上产生极不均匀的电压分布,且随着变频器与电动机之间电缆(线)长度的增加,在电动机接线端子上产生高频振荡的过电压,当电缆长度超过某一临界值后,电动机端子上过电压的幅值达到变频器输出电压的2倍,长时间重复性的电压应力的作用将导致电动机绕组匝间绝缘的过早破坏。 为了降低电动机端子上高频振荡的过电压
[工业控制]
飞思卡尔那些事之PWM控制直流电机
资源: 1、直流电机。当直流电机的接线端电压不同时,会出现正转或反转的状态。如接线柱A和B,当A为高电平,B为低电平时,电机正转;当A为低电平,B为高电平时,电机反转。在电机允许电压范围内,电压越高,输出功率越大,转速越快,反之,输出功率越小,转速越慢。 2、HCS12的PWM输出。通过PWM输出,可以在标准的TTL电平中,输出不同的电压。以控制电机的转速和转动方向。 3、33886。电机驱动芯片,内部集成半H桥。可以通过TTL电平控制V+电平输出。最高频达10KHz。电压范围为0到40V。最大电流为5A。可以工作在-60到125摄氏度的环境下。 方案: 1、HCS12中的PWM模块,通过硬件进行PWM输出。 2、HCS12中的E
[单片机]
无刷直流风扇电机180度正弦波控制
目前的变频风扇一般采用无刷直流电机,因其无励磁绕组、无换向器、无电刷、无滑环,结构比一般传统的交、直流电动机简单,运行可靠,维护简单。与鼠笼型感应电动机相比,其结构的简单程度和运行的可靠性大体相当,但由于没有励磁铁耗和铜耗,功率在300W以下时,其效率比同规格的交流电机高 10%~20%。 无刷直流电机一般采用方波驱动,采用霍尔传感器采样转子位置,以此为基准信号控制绕组强制换相。这种方案控制方法简单,成本低,在目前电动车方案中应用广泛。但由于方波驱动换相时会出现电流突变,导致转矩脉动较大,转动不平稳,噪声指标较差,难以在家电应用领域推广。而正弦驱动可以避免换相时的电流突变,虽然最大转矩会降低,但在噪声指标上有明显的优势。
[单片机]





 张燕宾电工实践
张燕宾电工实践 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练










 京公网安备 11010802033920号
京公网安备 11010802033920号