摘要:采用XILINX公司的SpartanII系列FPGA芯片设计了一种基于数字移相技术的高精度脉宽测量系统,同时给出了系统的仿真结果和精度分析。与通常的脉冲计数法相比,该系统的最大测量误差减小到原来的34.2%。
关键词:脉宽测量 数字移相 脉冲计数法 FPGA
在测量与仪器仪表领域,经常需要对数字信号的脉冲宽度进行测量。这种测量通常采用脉冲计数法,即在待测信号的高电平或低电平用一高频时钟脉冲进行计数,
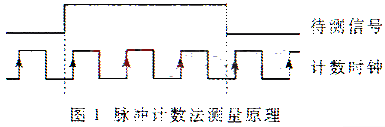 然后根据脉冲的个数计算待测信号宽度,如图1所示。待测信号相对于计数时钟通常是独立的,其上升、下降沿不可能正好落在时钟的边沿上,因此该法的最大测量误差为一个时钟周期。例如采用80MHz的高频时钟,最大误差为12.5ns。
提高脉冲计数法的精度通常有两个思路:提高计数时钟频率和使用时幅转换技术。时钟频率越高,测量误差越小,但是频率越高对芯片的性能要求也越高。例如要求1ns的测量误差时,时钟频率就需要提高到1GHz,此时一般计数器芯片很难正常工作,同时也会带来电路板的布线、材料选择、加工等诸多问题。时幅转换技术虽然对时钟频率不要求,但由于采用模拟电路,在待测信号频率比较高的情况下容易受噪声干扰,而且当要求连续测量信号的脉宽时,电路反应的快速性方面就存在一定问题。
区别于以上两种方法,本文提出另一种利用数字移相技术提高脉宽测量精度的思路并使用FPGA芯片实现测试系统。
然后根据脉冲的个数计算待测信号宽度,如图1所示。待测信号相对于计数时钟通常是独立的,其上升、下降沿不可能正好落在时钟的边沿上,因此该法的最大测量误差为一个时钟周期。例如采用80MHz的高频时钟,最大误差为12.5ns。
提高脉冲计数法的精度通常有两个思路:提高计数时钟频率和使用时幅转换技术。时钟频率越高,测量误差越小,但是频率越高对芯片的性能要求也越高。例如要求1ns的测量误差时,时钟频率就需要提高到1GHz,此时一般计数器芯片很难正常工作,同时也会带来电路板的布线、材料选择、加工等诸多问题。时幅转换技术虽然对时钟频率不要求,但由于采用模拟电路,在待测信号频率比较高的情况下容易受噪声干扰,而且当要求连续测量信号的脉宽时,电路反应的快速性方面就存在一定问题。
区别于以上两种方法,本文提出另一种利用数字移相技术提高脉宽测量精度的思路并使用FPGA芯片实现测试系统。
 1 测量原理
所谓移相是指对于两路同频信号,以其中一路为参考信号,另一路相对于该参考信号做超前或滞后的移动形成相位差。数字移相通常采用延时方法,以延时的长短来决定两数字信号间的相位差,本文提出的测量原理正是基于数字移相技术。如图2所示,原始计数时钟信号CLK0通过移相后得到CLK90、CLK180、CLK270,相位依次相差90%26;#176;,用这四路时钟信号同时驱动四个相同的计数器对待测信号进行计数。设时钟频率为f,周期为T,四个计数器的计数个数分别为m1、m2、m3和m4,则最后脉宽测量值为:
w=[(m1+m2+m3+m4)/4]%26;#215;T (1)
可以看到,这种方法实际等效于将原始计数时钟四倍频,以4f的时钟频率对待测信号进行计数测量,从而将测量精度提高到原来的4倍。例如原始计数时钟为80MHz时,系统的等效计数频率则为320MHz,如果不考虑各路计数时钟间的相对延迟时间误差,其测量的最大误差将降为原来的四分之一,仅为3.125ns。同时,该法保证了整个电路的最大工作频率仍为f,避免了时钟频率提高带来的一系列问题。
1 测量原理
所谓移相是指对于两路同频信号,以其中一路为参考信号,另一路相对于该参考信号做超前或滞后的移动形成相位差。数字移相通常采用延时方法,以延时的长短来决定两数字信号间的相位差,本文提出的测量原理正是基于数字移相技术。如图2所示,原始计数时钟信号CLK0通过移相后得到CLK90、CLK180、CLK270,相位依次相差90%26;#176;,用这四路时钟信号同时驱动四个相同的计数器对待测信号进行计数。设时钟频率为f,周期为T,四个计数器的计数个数分别为m1、m2、m3和m4,则最后脉宽测量值为:
w=[(m1+m2+m3+m4)/4]%26;#215;T (1)
可以看到,这种方法实际等效于将原始计数时钟四倍频,以4f的时钟频率对待测信号进行计数测量,从而将测量精度提高到原来的4倍。例如原始计数时钟为80MHz时,系统的等效计数频率则为320MHz,如果不考虑各路计数时钟间的相对延迟时间误差,其测量的最大误差将降为原来的四分之一,仅为3.125ns。同时,该法保证了整个电路的最大工作频率仍为f,避免了时钟频率提高带来的一系列问题。
 2 系统实现
系统实现的最关键部分是保证送入各计数器的时钟相对延迟精度,即要保证计数时钟之间的相位差。由于通常原始时钟频率已经相对较高(通常接近100MHz),周期在10~20ns之间,因此对时钟的延迟时间只有几ns,使用普通的延迟线芯片无法达到精度要求;同时为了避免电路板内芯片间传送延迟的影响,保证测试系统的精度、稳定性和柔性。本文采用现场可编程门阵列(FPGA)来实现所提出的测量方法。系统结构如图3所示。晶振产生原始输入时钟,通过移相计数模块后得到脉宽的测量值,测量结果送入FIFO缓存中,以加快数据处理速度,最后通过PCI总线完成与计算机的数据传输。逻辑控制用来协调各模块间的时序,保证系统的正常运行。为提高测试系统的灵活性和方便性,系统建立了内部寄存器,通过软件修改寄存器的值可以控制测试系统的启动停止,选择测量高电平或低电平等。移相计数模块、FIFO缓冲以及逻辑控制均在FPGA芯片内实现,芯片使用XILINX公司的SpartanII系列。
SpartanII系列是一款高性能、低价位的FPGA芯片,其最高运行频率为200MHz,这里选用其中的XC2S15-6(-6为速度等级)。芯片提供了四个高精度片内数字延迟锁定环路(Delay-Locked Loop,即DLL),可以保证芯片内时钟信号的零传送延迟和低的时钟歪斜(Clock Skew);同时可以方便地实现对时钟信号的常用控制,如移相、倍频、分频等。在HDL程序设计中,可以使用符号CLKDLL调用片内DLL结构,其管脚图如图4所示。主要管脚说明如下:
2 系统实现
系统实现的最关键部分是保证送入各计数器的时钟相对延迟精度,即要保证计数时钟之间的相位差。由于通常原始时钟频率已经相对较高(通常接近100MHz),周期在10~20ns之间,因此对时钟的延迟时间只有几ns,使用普通的延迟线芯片无法达到精度要求;同时为了避免电路板内芯片间传送延迟的影响,保证测试系统的精度、稳定性和柔性。本文采用现场可编程门阵列(FPGA)来实现所提出的测量方法。系统结构如图3所示。晶振产生原始输入时钟,通过移相计数模块后得到脉宽的测量值,测量结果送入FIFO缓存中,以加快数据处理速度,最后通过PCI总线完成与计算机的数据传输。逻辑控制用来协调各模块间的时序,保证系统的正常运行。为提高测试系统的灵活性和方便性,系统建立了内部寄存器,通过软件修改寄存器的值可以控制测试系统的启动停止,选择测量高电平或低电平等。移相计数模块、FIFO缓冲以及逻辑控制均在FPGA芯片内实现,芯片使用XILINX公司的SpartanII系列。
SpartanII系列是一款高性能、低价位的FPGA芯片,其最高运行频率为200MHz,这里选用其中的XC2S15-6(-6为速度等级)。芯片提供了四个高精度片内数字延迟锁定环路(Delay-Locked Loop,即DLL),可以保证芯片内时钟信号的零传送延迟和低的时钟歪斜(Clock Skew);同时可以方便地实现对时钟信号的常用控制,如移相、倍频、分频等。在HDL程序设计中,可以使用符号CLKDLL调用片内DLL结构,其管脚图如图4所示。主要管脚说明如下:
 CLKIN:时钟源输入,其频率范围为25~100MHz。
CLKFB:反馈或参考时钟信号,只能从CLK0或CLK2X反馈输入。
CLK?眼0|90|180|270?演:时钟输出,与输入时钟同频,但相位依次相差90%26;#176;。其内部定义了属性DUTY_CYCLE_CORRECTION,可以用来调整时钟的占空比,值为FALSE时,输出时钟占空比和输入时钟一致,值为TRUE时将占空比调整为50%。
CLK2X:时钟源倍频输出,且占空比自动调整为50%。
CLKDV:时钟源分频输出,由属性 CLKDV_DIVIDE控制N分频,N可以为1.5、2、2.5、3、4、5、8或16。
LOCKED:该信号为低电平时,表示延迟锁相环DLL还没有锁定信号,上述输出时钟信号未达到理想信号;当变为高电平时,表示锁相环已经完成信号锁定,输出时钟信号可用。若时钟源输入频率大于60MHz,则系统锁定时间大约需20μs。
利用DLL功能可以非常快速方便地构建移相计数模块,实现本文前面介绍的测量方法。移相计数模块结构如图5所示。原始时钟通过CLKDLL处理后得到的相位依次相差90%26;#176;的四路时钟输出为CLK0、CLK90、CLK180和CLK270,它们分别作为四个相同的16位计数器的计数时钟,待测信号连接计数器的使能端,同时控制四个计数器的启动和停止。有了各计数器的计数结果,再通过加法器得到累加的计数个数,最后计算出信号脉宽值。
CLKIN:时钟源输入,其频率范围为25~100MHz。
CLKFB:反馈或参考时钟信号,只能从CLK0或CLK2X反馈输入。
CLK?眼0|90|180|270?演:时钟输出,与输入时钟同频,但相位依次相差90%26;#176;。其内部定义了属性DUTY_CYCLE_CORRECTION,可以用来调整时钟的占空比,值为FALSE时,输出时钟占空比和输入时钟一致,值为TRUE时将占空比调整为50%。
CLK2X:时钟源倍频输出,且占空比自动调整为50%。
CLKDV:时钟源分频输出,由属性 CLKDV_DIVIDE控制N分频,N可以为1.5、2、2.5、3、4、5、8或16。
LOCKED:该信号为低电平时,表示延迟锁相环DLL还没有锁定信号,上述输出时钟信号未达到理想信号;当变为高电平时,表示锁相环已经完成信号锁定,输出时钟信号可用。若时钟源输入频率大于60MHz,则系统锁定时间大约需20μs。
利用DLL功能可以非常快速方便地构建移相计数模块,实现本文前面介绍的测量方法。移相计数模块结构如图5所示。原始时钟通过CLKDLL处理后得到的相位依次相差90%26;#176;的四路时钟输出为CLK0、CLK90、CLK180和CLK270,它们分别作为四个相同的16位计数器的计数时钟,待测信号连接计数器的使能端,同时控制四个计数器的启动和停止。有了各计数器的计数结果,再通过加法器得到累加的计数个数,最后计算出信号脉宽值。
 3 仿真和精度分析
图6给出了FPGA芯片内部布线后用Modelsim进行仿真的结果。在RESET后就启动移相计数模块,开始对待测信号进行测量,完成一次测量后产生READY信号,同时输出测量结果,以供后续部分使用。仿真的结果证明测试系统达到设计目标。
下面进一步对系统做深入的误差分析。造成系统测量脉宽误差的来源主要有系统原理误差TS、时钟相移误差TP和信号延迟误差Td以及计数时钟抖晃TC,如图7所示。
3 仿真和精度分析
图6给出了FPGA芯片内部布线后用Modelsim进行仿真的结果。在RESET后就启动移相计数模块,开始对待测信号进行测量,完成一次测量后产生READY信号,同时输出测量结果,以供后续部分使用。仿真的结果证明测试系统达到设计目标。
下面进一步对系统做深入的误差分析。造成系统测量脉宽误差的来源主要有系统原理误差TS、时钟相移误差TP和信号延迟误差Td以及计数时钟抖晃TC,如图7所示。
 由前所述,当80MHz晶振时钟输入时,系统原理误差TS=3.125ns。时钟相移误差为从CLKDLL中出来的四路时钟信号之间本身的相位偏移,根据芯片提供的参数,其最大TP为200ps。计数时钟抖晃是指从CLKDLL中输出的时钟信号本身周期的偏差,其最大TC为60ps。由于计数的时钟周期数较多,故平均后其对整个系统的测量误差影响可以忽略不计。
信号延迟误差即为由于芯片内部各信号传输延迟不一致而造成的四个计数器计数的同步误差。为分析该误差情况,用ISE 5.1提供的Timing Analyzer程序对关键路径做进一步的时间分析,得到的结果如表1所示。
表1 各信号到计数器的延迟分析(单位:ns)
计数器1
计数器2
计数器3
计数器4
计数时钟延迟CLK[0|90|180|270]
3.294
3.562
3.640
3.149
待测信号延迟
3.962
4.665
4.843
4.767
时钟相对信号延迟
0.668
1.103
1.203
1.618
延迟误差Td
Td=1.618-0.668=0.950
表中第一栏为从CLKDLL中出来的计数时钟到各自计数器的延迟时间,第二栏为用来控制计数器启动停止的HF信号到四个计数器的时间。由于需要的是各计数时钟间相对延迟时间,故第三栏给出时钟相对于HF信号到计数器的延迟,即为第一栏和第二栏的差值。由此得出信号延迟误差Td=0.950ns。
故有系统测量误差Γ为:
Γ=TS+TP+Td=4.275ns (2)
即脉宽测量最大误差为%26;#177;4.275ns。与脉冲计数法比较,同样的80MHz时钟输入,最大测量误差减小到原来的34.2%。
由前所述,当80MHz晶振时钟输入时,系统原理误差TS=3.125ns。时钟相移误差为从CLKDLL中出来的四路时钟信号之间本身的相位偏移,根据芯片提供的参数,其最大TP为200ps。计数时钟抖晃是指从CLKDLL中输出的时钟信号本身周期的偏差,其最大TC为60ps。由于计数的时钟周期数较多,故平均后其对整个系统的测量误差影响可以忽略不计。
信号延迟误差即为由于芯片内部各信号传输延迟不一致而造成的四个计数器计数的同步误差。为分析该误差情况,用ISE 5.1提供的Timing Analyzer程序对关键路径做进一步的时间分析,得到的结果如表1所示。
表1 各信号到计数器的延迟分析(单位:ns)
计数器1
计数器2
计数器3
计数器4
计数时钟延迟CLK[0|90|180|270]
3.294
3.562
3.640
3.149
待测信号延迟
3.962
4.665
4.843
4.767
时钟相对信号延迟
0.668
1.103
1.203
1.618
延迟误差Td
Td=1.618-0.668=0.950
表中第一栏为从CLKDLL中出来的计数时钟到各自计数器的延迟时间,第二栏为用来控制计数器启动停止的HF信号到四个计数器的时间。由于需要的是各计数时钟间相对延迟时间,故第三栏给出时钟相对于HF信号到计数器的延迟,即为第一栏和第二栏的差值。由此得出信号延迟误差Td=0.950ns。
故有系统测量误差Γ为:
Γ=TS+TP+Td=4.275ns (2)
即脉宽测量最大误差为%26;#177;4.275ns。与脉冲计数法比较,同样的80MHz时钟输入,最大测量误差减小到原来的34.2%。
 本文在数字移相技术的基础上设计了一种高精度的脉宽测量系统,使测量精度相对于脉冲计数法提高了多倍。若需进一步提高这种方法的测量精度,可以通过以下两个方面进行改进:(1)继续提高晶振频率,寻求速度更快的FPGA芯片。晶振频率越高,系统原理误差越小。(2)减小信号延迟误差。由前面可以看到,信号的延迟误差对系统精度的影响占了很大的比例。减小各计数时钟和待测信号到计数器的信号延迟的差异,可以有效地提高测量精度。由于FPGA内部信号延迟的时间均可以很方便地得到,因此在设计时可以通过调整内部各元件的放置位置以及连线来尽量减小延迟误差,或者通过添加一些门电路来增加延时以使各信号延迟时间尽可能相同。
本文在数字移相技术的基础上设计了一种高精度的脉宽测量系统,使测量精度相对于脉冲计数法提高了多倍。若需进一步提高这种方法的测量精度,可以通过以下两个方面进行改进:(1)继续提高晶振频率,寻求速度更快的FPGA芯片。晶振频率越高,系统原理误差越小。(2)减小信号延迟误差。由前面可以看到,信号的延迟误差对系统精度的影响占了很大的比例。减小各计数时钟和待测信号到计数器的信号延迟的差异,可以有效地提高测量精度。由于FPGA内部信号延迟的时间均可以很方便地得到,因此在设计时可以通过调整内部各元件的放置位置以及连线来尽量减小延迟误差,或者通过添加一些门电路来增加延时以使各信号延迟时间尽可能相同。
编辑: 引用地址:基于数字移相的高精度脉宽测量系统及其FPGA实现
然后根据脉冲的个数计算待测信号宽度,如图1所示。待测信号相对于计数时钟通常是独立的,其上升、下降沿不可能正好落在时钟的边沿上,因此该法的最大测量误差为一个时钟周期。例如采用80MHz的高频时钟,最大误差为12.5ns。
提高脉冲计数法的精度通常有两个思路:提高计数时钟频率和使用时幅转换技术。时钟频率越高,测量误差越小,但是频率越高对芯片的性能要求也越高。例如要求1ns的测量误差时,时钟频率就需要提高到1GHz,此时一般计数器芯片很难正常工作,同时也会带来电路板的布线、材料选择、加工等诸多问题。时幅转换技术虽然对时钟频率不要求,但由于采用模拟电路,在待测信号频率比较高的情况下容易受噪声干扰,而且当要求连续测量信号的脉宽时,电路反应的快速性方面就存在一定问题。
区别于以上两种方法,本文提出另一种利用数字移相技术提高脉宽测量精度的思路并使用FPGA芯片实现测试系统。
1 测量原理
所谓移相是指对于两路同频信号,以其中一路为参考信号,另一路相对于该参考信号做超前或滞后的移动形成相位差。数字移相通常采用延时方法,以延时的长短来决定两数字信号间的相位差,本文提出的测量原理正是基于数字移相技术。如图2所示,原始计数时钟信号CLK0通过移相后得到CLK90、CLK180、CLK270,相位依次相差90%26;#176;,用这四路时钟信号同时驱动四个相同的计数器对待测信号进行计数。设时钟频率为f,周期为T,四个计数器的计数个数分别为m1、m2、m3和m4,则最后脉宽测量值为:
w=[(m1+m2+m3+m4)/4]%26;#215;T (1)
可以看到,这种方法实际等效于将原始计数时钟四倍频,以4f的时钟频率对待测信号进行计数测量,从而将测量精度提高到原来的4倍。例如原始计数时钟为80MHz时,系统的等效计数频率则为320MHz,如果不考虑各路计数时钟间的相对延迟时间误差,其测量的最大误差将降为原来的四分之一,仅为3.125ns。同时,该法保证了整个电路的最大工作频率仍为f,避免了时钟频率提高带来的一系列问题。
2 系统实现
系统实现的最关键部分是保证送入各计数器的时钟相对延迟精度,即要保证计数时钟之间的相位差。由于通常原始时钟频率已经相对较高(通常接近100MHz),周期在10~20ns之间,因此对时钟的延迟时间只有几ns,使用普通的延迟线芯片无法达到精度要求;同时为了避免电路板内芯片间传送延迟的影响,保证测试系统的精度、稳定性和柔性。本文采用现场可编程门阵列(FPGA)来实现所提出的测量方法。系统结构如图3所示。晶振产生原始输入时钟,通过移相计数模块后得到脉宽的测量值,测量结果送入FIFO缓存中,以加快数据处理速度,最后通过PCI总线完成与计算机的数据传输。逻辑控制用来协调各模块间的时序,保证系统的正常运行。为提高测试系统的灵活性和方便性,系统建立了内部寄存器,通过软件修改寄存器的值可以控制测试系统的启动停止,选择测量高电平或低电平等。移相计数模块、FIFO缓冲以及逻辑控制均在FPGA芯片内实现,芯片使用XILINX公司的SpartanII系列。
SpartanII系列是一款高性能、低价位的FPGA芯片,其最高运行频率为200MHz,这里选用其中的XC2S15-6(-6为速度等级)。芯片提供了四个高精度片内数字延迟锁定环路(Delay-Locked Loop,即DLL),可以保证芯片内时钟信号的零传送延迟和低的时钟歪斜(Clock Skew);同时可以方便地实现对时钟信号的常用控制,如移相、倍频、分频等。在HDL程序设计中,可以使用符号CLKDLL调用片内DLL结构,其管脚图如图4所示。主要管脚说明如下:
CLKIN:时钟源输入,其频率范围为25~100MHz。
CLKFB:反馈或参考时钟信号,只能从CLK0或CLK2X反馈输入。
CLK?眼0|90|180|270?演:时钟输出,与输入时钟同频,但相位依次相差90%26;#176;。其内部定义了属性DUTY_CYCLE_CORRECTION,可以用来调整时钟的占空比,值为FALSE时,输出时钟占空比和输入时钟一致,值为TRUE时将占空比调整为50%。
CLK2X:时钟源倍频输出,且占空比自动调整为50%。
CLKDV:时钟源分频输出,由属性 CLKDV_DIVIDE控制N分频,N可以为1.5、2、2.5、3、4、5、8或16。
LOCKED:该信号为低电平时,表示延迟锁相环DLL还没有锁定信号,上述输出时钟信号未达到理想信号;当变为高电平时,表示锁相环已经完成信号锁定,输出时钟信号可用。若时钟源输入频率大于60MHz,则系统锁定时间大约需20μs。
利用DLL功能可以非常快速方便地构建移相计数模块,实现本文前面介绍的测量方法。移相计数模块结构如图5所示。原始时钟通过CLKDLL处理后得到的相位依次相差90%26;#176;的四路时钟输出为CLK0、CLK90、CLK180和CLK270,它们分别作为四个相同的16位计数器的计数时钟,待测信号连接计数器的使能端,同时控制四个计数器的启动和停止。有了各计数器的计数结果,再通过加法器得到累加的计数个数,最后计算出信号脉宽值。
3 仿真和精度分析
图6给出了FPGA芯片内部布线后用Modelsim进行仿真的结果。在RESET后就启动移相计数模块,开始对待测信号进行测量,完成一次测量后产生READY信号,同时输出测量结果,以供后续部分使用。仿真的结果证明测试系统达到设计目标。
下面进一步对系统做深入的误差分析。造成系统测量脉宽误差的来源主要有系统原理误差TS、时钟相移误差TP和信号延迟误差Td以及计数时钟抖晃TC,如图7所示。
由前所述,当80MHz晶振时钟输入时,系统原理误差TS=3.125ns。时钟相移误差为从CLKDLL中出来的四路时钟信号之间本身的相位偏移,根据芯片提供的参数,其最大TP为200ps。计数时钟抖晃是指从CLKDLL中输出的时钟信号本身周期的偏差,其最大TC为60ps。由于计数的时钟周期数较多,故平均后其对整个系统的测量误差影响可以忽略不计。
信号延迟误差即为由于芯片内部各信号传输延迟不一致而造成的四个计数器计数的同步误差。为分析该误差情况,用ISE 5.1提供的Timing Analyzer程序对关键路径做进一步的时间分析,得到的结果如表1所示。
表1 各信号到计数器的延迟分析(单位:ns)
计数器1
计数器2
计数器3
计数器4
计数时钟延迟CLK[0|90|180|270]
3.294
3.562
3.640
3.149
待测信号延迟
3.962
4.665
4.843
4.767
时钟相对信号延迟
0.668
1.103
1.203
1.618
延迟误差Td
Td=1.618-0.668=0.950
表中第一栏为从CLKDLL中出来的计数时钟到各自计数器的延迟时间,第二栏为用来控制计数器启动停止的HF信号到四个计数器的时间。由于需要的是各计数时钟间相对延迟时间,故第三栏给出时钟相对于HF信号到计数器的延迟,即为第一栏和第二栏的差值。由此得出信号延迟误差Td=0.950ns。
故有系统测量误差Γ为:
Γ=TS+TP+Td=4.275ns (2)
即脉宽测量最大误差为%26;#177;4.275ns。与脉冲计数法比较,同样的80MHz时钟输入,最大测量误差减小到原来的34.2%。
本文在数字移相技术的基础上设计了一种高精度的脉宽测量系统,使测量精度相对于脉冲计数法提高了多倍。若需进一步提高这种方法的测量精度,可以通过以下两个方面进行改进:(1)继续提高晶振频率,寻求速度更快的FPGA芯片。晶振频率越高,系统原理误差越小。(2)减小信号延迟误差。由前面可以看到,信号的延迟误差对系统精度的影响占了很大的比例。减小各计数时钟和待测信号到计数器的信号延迟的差异,可以有效地提高测量精度。由于FPGA内部信号延迟的时间均可以很方便地得到,因此在设计时可以通过调整内部各元件的放置位置以及连线来尽量减小延迟误差,或者通过添加一些门电路来增加延时以使各信号延迟时间尽可能相同。  嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练 LTC6091HUFE#TRPBF
LTC6091HUFE#TRPBF
小广播
热门活动
换一批
更多

最新半导体设计/制造文章
- 意法半导体披露 2027-2028 年财务模型及2030年目标实现路径
- 创实技术electronica 2024首秀:加速国内分销商海外拓展之路
- 欧洲三大芯片巨头,重新审视供应链
- 一场IC设计业盛宴!10场论坛 200位演讲嘉宾,300+展商亮相2万平米专业展会!
- 富昌电子于杭州举办技术日活动,聚焦新能源“芯”机遇
- 消息称铠侠最快明天获上市批准,市值有望达 7500 亿日元
- 美国政府敲定对格芯 15 亿美元《CHIPS》法案补贴,支持后者提升在美产能
- SK 海力士宣布量产全球最高的 321 层 1Tb TLC 4D NAND 闪存,计划 2025 上半年对外出货
- 三星电子 NRD-K 半导体研发综合体进机,将导入 ASML High NA EUV 光刻设备






更多热门文章
更多每日新闻
更多往期活动
11月23日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号