1 引言
近年来,随着无线通讯,传感器技术以及嵌入式计算等技术的不断进步,推动了低成本、低功耗的物联网技术的发展,促使物联网技术成为当今活跃的研究领域[1]。物联网由部署在监测区域内大量的廉价微型传感器节点组成,通过无线通讯方式形成的一个网络系统,其目的是协作地感知、采集和处理网络覆盖区域中感知对象的信息,并发送给观察者。无线传感器网络在军事和民用领域都有广阔的应用前景[2]。物联网(Internet of Things)指的是将无处不在的末端设备和设施,包括具备“内在智能”的传感器、移动终端、工业系统、楼控系统、家庭智能设施、视频监控系统等和“外在使能”的,如贴上RFID的各种资产、携带无线终端的个人与车辆等“智能化物件或动物”或“智能尘埃”[3]。通过各种无线长距离或短距离通讯网络实现互联互通、应用大集成、以及基于云计算的SaaS营运等模式,提供安全可控乃至个性化的实时在线监测、定位追溯、报警联动、调度指挥、预案管理、远程控制、安全防范、远程维保、在线升级、统计报表、决策支持、领导桌面等管理和服务功能,实现对“万物”的“高效、节能、安全、环保”的“管、控、营”一体化[4]。物联网的关键技术,体系结构,系统模式以及网络体系和服务体系都成为当前的研究热点[5]。本文把物联网技术引入到校园自行车防盗系统中,给出了一套基于物联网的校内自行车防盗系统的设计方案,为校园内自行车的管理提供保障。
物联信息处理中心,结构框图如图1:
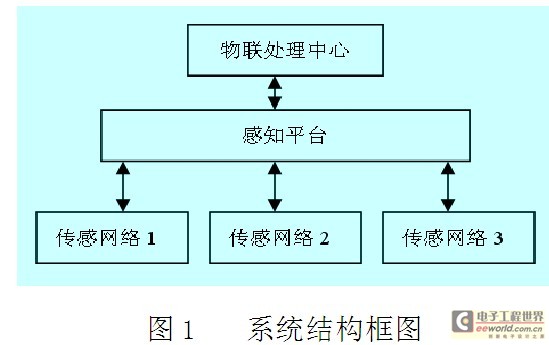
传感网络:传感网络是本系统的基本组成部分,采用ZigBee网络,被保护的物体上都含有一个由ZigBee节点和一个加速度传感器组成的设备节点,传感网络负责对进入本网络的设备节点进行位置定位,设备节点会记录位置信息,当有人移动自行车时,加速度传感器作出反应,触发设备节点再次测算位置信息,当位置发生一定程度的位移时,即发送报警信息给ZigBee网络协调器,同时本地作出报警反应。在自行车被偷窃后,设备节点也会实时测算自己在传感网络中的最新位置信息,并上传给信息处理中心。
感知平台:感知平台由ZigBee网络的协调器以及一个协议转换平台构成,协议转换平台是由专门的MCU构成。感知平台作为信息汇聚节点,负责把每个ZigBee网络的数据汇聚起来,再利用TCP/IP协议,将数据通过有线或是无线的方式发送给物联信息处理中心。
物联信息处理中心:对感知平台传送来的数据进行分析处理,对报警信息作出反应,通过移动网络将报警信息传递给物主本人,同时将报警信息和物体的最新位置信息传递给学校保卫处,启动相应位置的监控设备,并派出安保人员进行处理。此外,物联信息处理中心还可以进一步扩充,作为全校物联信息的数据处理中心,对全校范围内的传感网络进行管理,真正实现感知校园、智慧校园。
3 硬件设计
校园自行车防盗系统硬件设计的核心是无线网络节点设计,按照系统中承担的任务划分,可划分为一般的传感节点和感知平台。但这两类只是略有不同,硬件上并无本质不同,都是这几大部分(如图2)。

(1) 微型处理器
本设计选用CC2430作为主处理器,CC243是一颗真正的系统芯片COMS解决方案,它结合一个高性能2.4GHz DSSS射频收发器核心和一颗工业级小巧高效的8051控制器。CC2430的设计结合了8Kbyte的RAM以及强大的外围模块,在本设计中无需外扩存储器,它的低成本,低功耗的特点也是采用本处理器的重要原因。
(2) 信息采集模块
此处选择的是美新加速度传感器,它是按照CMOS工艺集成的双轴测量加速度的装置。装置的工作原理基于热对流,工作像其他加速计一样,不同在于它是一个气泡在MEMSIC装置中。一个单一的热源悬浮在单晶硅中的密闭的空间,成组热电偶等间距的分布在热源的四周。在没有加速度时,热源四周的温度阶梯一样,所以所有电偶处的温度相同,热电偶输出电压也就一样。由于热对流的任意性,加速计的每个方向都可能打破温度的平衡而呈现出非线性,由于温度变化,所以四个热电偶输出地电压就不同。不同的加速与输出地不同电压成直接比例关系。加速计上有两个完全相同的加速度信号线分别用来测量X,Y轴的加速度。
它通过混合信号处理和集成IIC总线组成一个完整的传感系统(工作时序图如图3),可以直接和微处理器连接而不再需要A/D转换。MXC6202xG/H/M/N芯片测量加速范围±2g,工作在3.0V25℃环境下精度可达到g/512—g/128,动态静态加速都可测量。利用自行车被盗时有加速度的特点,用AT89S51单片机采集传感器的信息,通过一段时间来判断自行车的被盗与否,然后将信息发送给无线装置。 [page]

(3) 透传模块
透传模块的好处在于用户不需要考虑模块中程序如何运行的,用户只需要将自己的数据通过串口发送到模块里,然后模块会自动把数据用无线发送出去,并按照预先配置好的网络结构,和网络中的目的地址节点进行收发通讯了,接收模块会进行数据校验,如数据无误即通过串口送出。实际运行起来,非常的简单方便。
(4) 其它模块
电源模块服务于整个节点系统,为自己的系统供电;而按键模块主要是用来设置系统状态,各模块在正常运行,正常配合的状态下才使得整个系统运行。
实验实物如图4:

4 软件系统设计
(1) 网络描述:
入网:
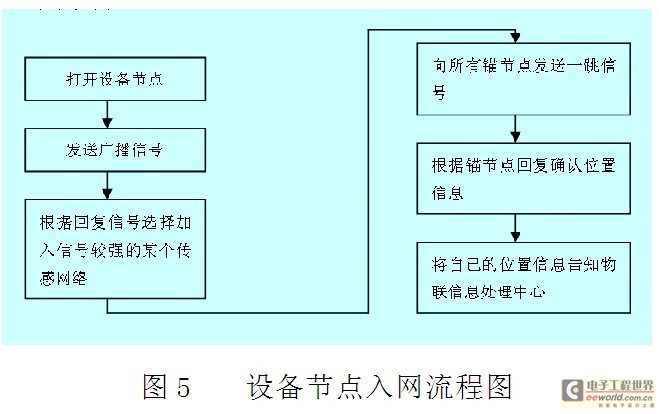
当安装有设备节点的自行车进入传感器网络时,用户打开设备节点使其处于工作状态,此时,设备节点发送广播信号,所有收到广播信号的Router节点回复一个信号,设备节点从接收到的回复信号中进行选择,因为设备节点所处的位置可能有多个传感网络,所以设备节点会选择一个信号质量较好的网络加入。
入网后,设备节点会重复多次向本网中所有的锚节点发送一个一跳信号,所有锚节点接收到这个一跳信号后,会计算接收到的平均信号强度,根据这个平均信号强度,和锚节点本身设置的坐标信息,来计算出设备节点的位置信息,并告诉设备节点。
得到位置信息后,设备节点会经过Router节点连接到协调器,把自己的位置信息以及自己所处的传感网络的网络号经感知平台发送给物联信息处理中心。此时,物联网络中心就可以知道这个要保护的物体在校园的具体位置了。
整个入网流程如图5:
报警:
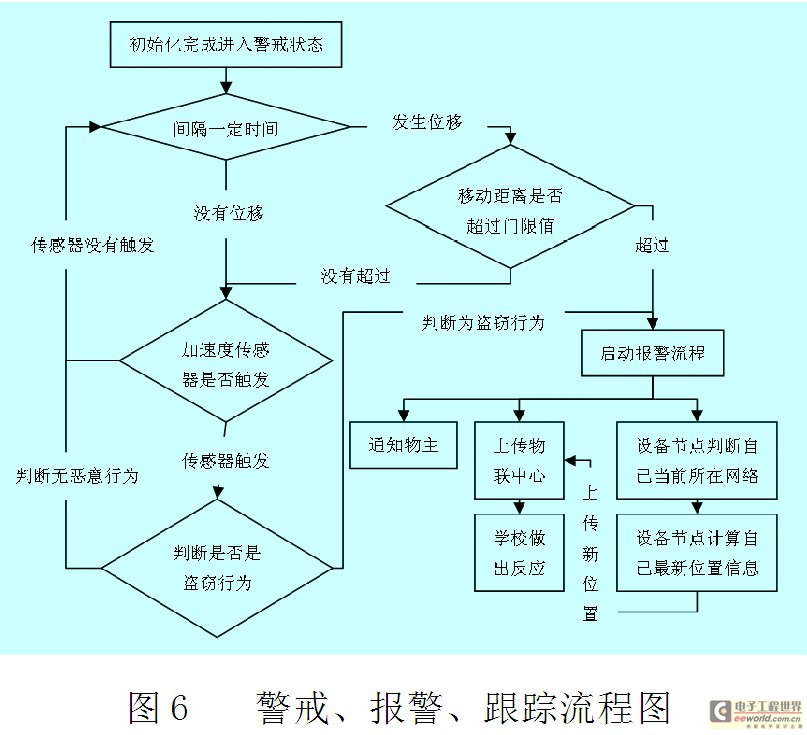
当设备节点开启并初始化完成后,且已经把自身的位置信息告知了物联信息处理中心,则此时,设备节点已经处于警戒状态。
当有人移动物体时,会影响加速度传感器作出反应,触发设备节点,设备节点此时处于高度警戒状态,连续的向锚节点发送信号,来获取自己的位置信息,间隔发送时间设置为1秒。当别人是无恶意的移动时,比如可能是挪动自行车以便别人存放其它自行车,在处理流程上可以理解为物体只是移动了很短的距离,则认为是无恶意移动,不作出报警反应。当物体移动了很远的距离,超过了门限值,则认为发生了盗窃行为,立即启动报警反应,同时报警信息将通过协调器上传到物联信息处理中心,并通过移动网络告知物主本人,并启动学校应急预案。
跟踪:
当物体的设备节点确认遭窃后,设备节点会连续发送广播信号,根据收集到的Router节点的回复信号的强弱,判断自己现在位于哪个传感网络,并随即向此传感网络中的锚节点发送信号,来确认自己在此网络中的位置。之后设备节点将自己最新的位置信息经协调器、感知平台上传到信息处理中心,从而实现跟踪功能。同时结合校园内已有的监控资源,有效帮助安保人员制止盗窃分子得逞。
整个警戒、报警、跟踪流程如图6。
(2) 上位机设计
上位机是信息处理中心,是一个中心服务器,负责管理各个传感网络,并对各个网络传来的数据进行分析处理。当设备节点入网后,信息处理中心记录其位置信息,包括属于哪个传感网络,位于传感网络中的位置等信息。当设备节点发出报警信息后,将报警信息上传给信息处理中心,启动所在区域的闭路监控设备。各部分系统联动,阻止盗窃行为的发生。 [page]
采用VisualBasic6.0软件开发图形界面,提供良好的人机界面,方便人机交互,该软件支持可视化编程和面向对象技术。VB 软件的设计实现是首先根据特定的通信协议完成PLC 与上位机之间通信,使上位机能正确读出PLC 指定数据区的内容,然后将数据显示出来。
实际效果如图7:

5 应用范围
本系统可以移植应用在各处防盗的场所,比如对档案室内档案的管理,学生笔记本的防盗,金银首饰的防盗,小型工厂内贵重器械的防盗等等,都是可以实现的。系统主要的功能就是防盗,所以在物品防盗方面,应用此系统可以给人们减少很多麻烦。
本系统实际应用在大庆石油学院部分区域的布置示意图如图8:

6 结束语
目前,越来越多的学校学生抱怨自行车丢失的问题,本系统主要是利用重力加速度传感器来判断自行车的丢失情况,利用ZigBee无线传输和定位的特点用于校园的自行车防盗,可以帮助学生解决丢车的问题。这套防盗系统同样可以植入其它的应用领域,可以实现对物品的监控,便于人们的管理,使科学技术更好的服务于人类。
参考文献:
[1] 彭晓珊.关于物联网技术发展及应用前景的研究[J].汕头科技,2010,(1):25-26.
[2] 冯培昌,周晓云,陈孝伟.无线传感网络探讨[J].电气自动化,2005,27(5):73-74.
[3] 孟敬,刘寿强,冯建.基于zigbee的智能交通车辆数据采集器的设计与实现[J].传感器世界,2011,6:30-31.
[4] 韩磊.基于WSN的小区自行车防盗系统的设计[J].微型计算机与应用,2011,30(2):112-113.
[5] 王志宇,刘辉,张千里.自认知型物联网的结构模型研究及其应用[J].自动化技术与应用, 2011,30(6):38-40.
上一篇:校内自行车防盗跟踪系统的设计
下一篇:基于DS18B20的温度测量和显示系统设计与仿真
推荐阅读最新更新时间:2024-03-16 13:15

 机器人学 (蔡自兴)
机器人学 (蔡自兴) Electric Motor Control: DC, AC, and BLDC Motors
Electric Motor Control: DC, AC, and BLDC Motors
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- 报名有礼:【TI C2000在实时控制系统中的新特性】网络直播诚邀您参与!
- 免费申请TI 样片,晒单赢好礼!
- 是德科技有奖问答活动之一,A4WP无线充电测试的示波器方案,答题闯关赢好礼!
- 打卡世健的ADI之路首站“工业自动化站”,赢Kindle、《新概念模拟电路》
- 英飞凌考考你关于AI芯片的冷知识
- TI 样片免费申请,晒样片赢好礼☞2
- 下载有礼:一起初探5G,赢氮化镓(GaN)充电器、柔性墨水屏等精美礼品
- 【技术直播】 MPS、Nexperia、泰克专家齐聚,畅谈新能源汽车动力设计注意要点
- 参会领开发板盲盒:2023 RT-Thread开发者大会报名啦!
- 逛村田在线云展厅,看干货,闯关赢好礼!




 京公网安备 11010802033920号
京公网安备 11010802033920号