#include
#define uint unsigned int
#define uchar unsigned char
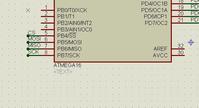
#define CS_H PORTB|=(1<<4)
#define CS_L PORTB&=~(1<<4)
void SPI_MasterInit(void)
{
/* 设置MOSI 和SCK 为输出,其他为输入 */
DDRB = (1<<4)|(1<<5)|(1<<7);
/* 使能SPI 主机模式,设置时钟速率为fck/16 */
SPCR = (1<
}
void SPI_MasterTransmit(uchar cData)
{
/* 启动数据传输 */
SPDR = cData;
/* 等待传输结束 */
while(!(SPSR & (1<
}
void M7219_send(uchar b1,uchar b2)
{
CS_L;
SPI_MasterTransmit(b1);
SPI_MasterTransmit(b2);
CS_H;
}
void delay(uint ms)
{
uint i,j;
for(i=0;i
for(j=0;j<1141;j++);
}
void main()
{
uchar i,j;
SPI_MasterInit();
//M7219_send(0x0f,0xff);
M7219_send(0x09,0xff);//手册说0x07 Code B decode for digits 7–0
//感觉有问题,直接写0xff了
M7219_send(0x0a,0x05);//Intensity Register
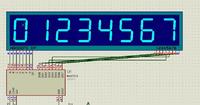
M7219_send(0x0b,0x07);//Display digits 0 1 2 3 4 5 6 7
M7219_send(0x0c,0x01);//开显示
while(1)
for(i=0;i<8;i++)
M7219_send(i+1,i);
}
关键字:max7219 8段数码管 spi接口
引用地址:
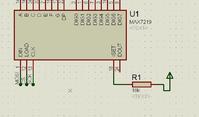
max7219控制8段数码管 spi接口
推荐阅读最新更新时间:2024-03-16 15:06
基于Proteus的Arm处理器的SPI接口实现
基于Proteus的Arm处理器的SPI接口实现 引言 现在,人们生活中的每个角落都有嵌入式设备的存在,比如DVD、移动电话、MP3及掌上电脑等等。这些嵌入式设备多采用32位RISC嵌入式处理器作为核心部件。其中基于Arm核的嵌入式处理器独占鳌头,在32位RISC处理器中占据超过75%的市场份额。因而越来越多的电子爱好者都加入了学习ARM的队伍中。通过和一般单片机系统开发过程的比较不难发现,嵌入式系统的设计包括硬件设计和软件设计两个方面,其调试过程包括软件调试、硬件测试、系统调试3个过程。软件调试一般比较容易进行,但是硬件测试和系统调试则比较麻烦,因为要进行这两个过程必须在 PCB制作、元器件焊接完毕之后才能进行;而PC
[模拟电子]

Microchip最新集成SPI接口的非易失性数字电位器
全新7位及8位器件可应用于更广泛的工业温度范围 全球领先的单片机和模拟半导体供应商——Microchip Technology Inc.(美国微芯科技公司)宣布推出 MCP4141/2、MCP4241/2、MCP4161/2及MCP4261/2 (MCP41XX/42XX) 非易失性数字电位器。全新7位及8位器件集成了串行外设接口 (SPI),适用于零下40至125摄氏度更广泛的工业温度范围。此外,新器件还备有多种符合工业标准的封装,包括深受欢迎的 3 x 3毫米DFN封装。 与机械式电位器相比,MCP41XX/42XX 器件的不同之处在于它可通过SPI接口实现数字控制,有助于提高系统的精度、灵活性及生产能力,并降低制造成本。
[新品]
基于增强型SPI接口的大容量Flash扩展实现
1引言
随着信息时代的到来,各种信息的集成和交互越来越频繁。运动控制系统中需要处理和存储的信息量也与日俱增,大部分运动控制系统的核心器件MCU自身已经集成了较大容量的存储器(与以前MCU相比),但仅仅依靠MCU自身的存储器一般很难满足系统对大容量存储的要求,因此必须找到高效的方法实现对系统存储容量的扩展。
SPI是一个高效、数据位数可编程设置的高速输入/输出串行接口,几乎所有MCU生产厂商都提供对SPI接口的支持,目前高速SPI接口的时钟频率已达到60MHz甚至更高,SPI接口一般只用4根连接线即可完成所有的数据通讯和控制操作,因此不占用MCU的数据总线和地址总线,极大的节约了系统的硬件资源,是一种经济实用的扩展系统
[缓冲存储]
基于AVR单片机的SPI接口的25C256
基于AVR单片机的SPI接口的25C256(EEPROM)的驱动程序 /**********************************硬件宏定义***********************************/ #define SelectMemory1() (PORTA&=~0X01) #define DeselectMemory1() (PORTA|=0X01) #define ClrHoldMemory1() (PORTA&=~(0X01 2)) #define SetHoldMemory1() (PORTA|=(0X01 2)) /***********************************初始化SP
[单片机]
SPI接口原理与配置与其实验操作
SPI接口原理: SPI接口简介: SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。 SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。 SPI内部结构简明图: (移位寄存器:将最高位 / 最低位移出去给另一个移位寄存器。高→高,低→低) SPI接口一般使用4条线通信: MISO 主设备数据输入,从设备数据输出。
[单片机]
avr单片机驱动max7219的程序
#include iom16v.h #include macros.h #define uchar unsigned char #define uint unsigned int //定义输出io口 #define Y1_OUT DDRC|=BIT(5); #define Y1_H PORTC|=BIT(5); #define Y1_L PORTC&=~BIT(5); #define Y2_OUT DDRD|=BIT(6); #define Y2_H PORTD|=BIT(6); #define Y2_L PORTD&=~BIT(6); #define Y3_OUT DDRD|=BIT(7); #define Y3_H
[单片机]
表白神器 MAX7219点阵驱动程序
MAX7219驱动点阵的原理图如下: 单片机+MAX7219点阵源程序如下: #include reg52.h #include intrins.h #define uchar unsigned char #define uint unsigned int //定义Max7219端口 sbit Max7219_pinCLK = P2^2; sbit Max7219_pinCS = P2^1; sbit Max7219_pinDIN = P2^0; uchar code disp1 ={ {0x3C,0x42,0x42,0x42,0x42,0x42,0x42,0x3C},//0 {0x10,0x18,0x14,0x10,0x
[单片机]
基于TMC428的步进电机控制系统设计
引言 步进电机是一种重要的执行装置,广泛用于工业控制和各种办公设备中,步进电机的稳定可靠运行直接关系到工业控制的精度和设备的质量,特别是在高精度数控系统中更是要求步进电机能够精确运行。如何实现对步进电机的精确可靠控制成为工业控制等系统中的关键技术。多年来很多专家学者研制出很多性能较好的步进电机控制系统,然而,早期的步进电机控制系统体积大,使用的元器件多,这给系统的可靠运行带来了较大的隐患。随着电子技术的发展,很多功能单元都走向模块化和数字化,并且具有体积小,重量轻,工作可靠性高,成本低等优点,而且能够实现多轴控制,这给步进电机控制系统的设计带来了很大的方便。由 TRINAMIC公司生产的TMC428就是这样一款三轴步进电
[工业控制]




 智能传感器系统设计与应用 (沙占友)
智能传感器系统设计与应用 (沙占友) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用











 京公网安备 11010802033920号
京公网安备 11010802033920号