从51开始,单片机玩了很长时间了,有51,PIC,AVR等等,早就想跟潮流玩玩ARM,但一直没有开始,原因-----不知道玩了ARM可以做什么(对我自己而言)。如果为学习而学习,肯定学不好。然后cortex-m3出来了,据说,这东西可以替代单片机,于是马上开始关注。也在第一时间开始学习,可惜一开始就有点站错了队,选错了型(仍是对我自己而言)。我希望这种芯片应该是满大街都是,随便哪里都可以买得到,但我选的第一种显然做不到。为此,大概浪费了一年多时间吧,现在,回到对我来说是正确的道路上来啦,边学边写点东西
这里写的是我的学习的过程,显然,很多时候会是不全面的,不系统的,感悟式的,甚至有时会是错误的,有些做法会是不专业的。那么,为什么我还要写呢?这是一个有趣的问题,它甚至涉及到博客为什么要存在的问题。显然,博客里面的写的东西,其正确性、权威性大多没法和书比,可为什么博客会存在呢?理由很多,我非专家,只说作为一个学习32位单片机的工程师角度来分享整个学习过程,整理成一个学习手记,也便于以后文档备份。
本章节将学习
一、认识ADC兼进一步看懂STM的库
ADC是多少位的?
12位
ADC有多少个?
1个、2个或多至3个,视不同的器件而不同;每个又有多个通道。
关于通道的名堂:
10.3.3 通道选择
有16个多路通道。可以把转换分成两组:规则的和注入的。在任意多个通道上以任意顺序进行的一系列转换构成成组转换。例如,可以如下顺序完成转换:通道3、通道8、通道2、通道2、通道0、通道2、通道2、通道15。
● 规则组由多达16个转换组成。规则通道和它们的转换顺序在ADC_SQRx寄存器中选择。规则组中转换的总数写入ADC_SQR1寄存器的L[3:0]位中。
● 注入组由多达4个转换组成。注入通道和它们的转换顺序在ADC_JSQR寄存器中选择。注入组里的转换总数目必须写入ADC_JSQR寄存器的L[1:0]位中。
它们有什么区别:
l 不同的组转换后保存数据的地方不一样,产生的中断标志不一样。
l 在扫描模式下,规则组会有能力把各通道数据通过DMA传给SRAM,而注入组的数据总是存在在ADC_JDRx中。
还有其他的一些区别,这里暂不一一罗列。
ST为什么这么样来设计AD转换,肯定是有理由的,但是我不知道,因此,我也就难以深入地理解AD转换的各种模式。这也就是说,对于知识的理解,要把它放在其应用背景中去学习才能学得好。因此,其他知识积累得越多,学起来也就越快,这也就是所谓的“功底”问题。某人功底深厚,意味着他见多识广,遇到的事情多,能够很快找到处理某件事情的“原型”。当然,也有一些人抽象学习能力极强,就算找不到“原型”,他也能学得很好。基本上,这类人的科学素养更高一些,在工程师、工科类学生中并不多见。
闲话少说,下面来看怎么样来使用AD转换器?
以一段源程序为例分别来解读,同时进一步理解STM32中有关符号的含义,相信以后再读库源程序,定能更上一层楼。
为看得清楚一些,以下代码用一种颜色表示。
/* ADC1 开始准备配置*/
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
/*设置ADC-》CR1的19:16,确定ADC工作模式,一共有10种工作模式
#define ADC_Mode_Independent ((uint32_t)0x00000000) 0000:独立模式
#define ADC_Mode_RegInjecSimult ((uint32_t)0x00010000) 0001:混合的同步规则+注入同步模式
#define ADC_Mode_RegSimult_ALTErTrig ((uint32_t)0x00020000) 0010:混合的同步规则+交替触发模式
#define ADC_Mode_InjecSimult_FastInterl ((uint32_t)0x00030000) 0011:混合同步注入+快速交替模式
#define ADC_Mode_InjecSimult_SlowInterl ((uint32_t)0x00040000) 0100:混合同步注入+慢速交替模式
#define ADC_Mode_InjecSimult ((uint32_t)0x00050000) 0101:注入同步模式
#define ADC_Mode_RegSimult ((uint32_t)0x00060000) 0110:规则同步模式
#define ADC_Mode_FastInterl ((uint32_t)0x00070000) 0111:快速交替模式
#define ADC_Mode_SlowInterl ((uint32_t)0x00080000) 1000:慢速交替模式
#define ADC_Mode_AlterTrig ((uint32_t)0x00090000) 1001:交替触发模式
*/
ADC_InitStructure.ADC_SCANConvMode = ENABLE;
/* ADC_ScanConvMode在stm32f10x_adc.h中定义如下:
FunctionalState ADC_ScanConvMode;
这个参数用来指定转换是扫描(多通道模式)还是单个转换(单通道模式),该参数可以被设置为DISABLE或者ENABLE。
在数据手册中,SCAN位是这样描述的:扫描模式
该位由软件设置和清除,用于开启或关闭扫描模式。在扫描模式中,由ADC_SQRx或ADC_JSQRx寄存器选中的通道被转换。
0:关闭扫描模式
1:使用扫描模式
注:如果分别设置了EOCIE或JEOCIE位,只在最后一个通道转换完毕才会产生EOC或JEOC中断。
这样,如果一次需要对多个通道进行转换,这位就必须设置为ENABLE。
*/
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
/* FunctionalState ADC_ContinuousConvMode;
这个参数用来指定转换是连续进行还是单次进行,它可以设置为ENABLE或者DISABLE。
这两个参数中出现了FunctionalState数据类型,那么它是什么呢,顺滕摸瓜,可以看到它的的定义如下:
typedef enum {DISABLE = 0, ENABLE = !DISABLE} FunctionalState;
因此,它相当于是一个位变量,我的理解,DISPABLE=0这个没有问题,ENABLE=!DISABLE是否应该确切的是1??否则下面的设置就会有问题。
用这两个符号来对寄存器中的位进行设置的话,还需要提供位置信息,如下面的代码所示:
tmpreg1 |= (uint32_t)(ADC_InitStruct-》ADC_DataAlign | ADC_InitStruct-》ADC_ExternalTrigConv |
((uint32_t)ADC_InitStruct-》ADC_ContinuousConvMode 《《 1));
这个《《1就是位置信息,CONT是CON2寄存器的位1
这样,我们看STM32的库又能多看懂一点了。
用于设定CON2的CONT位(位1):是否连续转换
该位由软件设置和清除。如果设置了此位,则转换将连续进行直到该位被清除。
0:单次转换模式 1:连续转换模式
*/
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
/* uint32_t ADC_ExternalTrigConv;
定义如何来触发AD转换,一共有8个可选项,以下给出两个来解释一下:
#define ADC_ExternalTrigConv_T1_CC3 ((uint32_t)0x00040000)
将0x00040000写成二进制,就是:
0000 0000 0000 0100 0000 0000 0000 0000
对照下面的说明,不难看出,第19:17位是 010,即定时器1的CC3事件触发。
#define ADC_ExternalTrigConv_None ((uint32_t)0x000E0000)
将0x000E0000写成二进制,就是:
0000 0000 0000 1110 0000 0000 0000 0000
对照下面的说明,是SWSTART方式,即用软件标志来启动转换。
关于EXTSEL[2:0]的说明:
位19:17 EXTSEL[2:0]:选择启动规则通道组转换的外部事件
这些位选择用于启动规则通道组转换的外部事件
ADC1和ADC2的触发配置如下
000:定时器1的CC1事件 100:定时器3的TRGO事件
001:定时器1的CC2事件 101:定时器4的CC4事件
010:定时器1的CC3事件 110:EXTI线11/ TIM8_TRGO,
仅大容量产品具有TIM8_TRGO功能
011:定时器2的CC2事件 111:SWSTART
ADC3的触发配置如下
000:定时器3的CC1事件 100:定时器8的TRGO事件
001:定时器2的CC3事件 101:定时器5的CC1事件
010:定时器1的CC3事件 110:定时器5的CC3事件
011:定时器8的CC1事件 111:SWSTART
*/
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
/*
这个是用来设定数据对齐模式的,有两种可能:
#define ADC_DataAlign_Right ((uint32_t)0x00000000)
#define ADC_DataAlign_Left ((uint32_t)0x00000800)
找到数据手册上的相关说明:
位11:ALIGN:数据对齐
该位由软件设置和清除。
0:右对齐 1:左对齐
*/
ADC_InitStructure.ADC_NbrOfChannel = 1;
/* ADC_NbrOfChannel的定义如下:
uint8_t ADC_NbrOfChannel;
指定有多少个通道会被转换,它的值可以是1~16,这个数据将会影响到寄存器ADC_SQR1,下面是stm32f10x_adc.c中的相关代码:
。。.。。.
tmpreg2 |= (uint8_t) (ADC_InitStruct-》ADC_NbrOfChannel - (uint8_t)1);
tmpreg1 |= (uint32_t)tmpreg2 《《 20;
ADCx-》SQR1 = tmpreg1;
看到mpreg1 |= (uint32_t)tmpreg2 《《 20;中的:20,用上面我们刚理解到的原则,这个值的低位将在ADC_SQR1的20位,而它的值是1~16,从代码中可以看到这里又减去1,则其设置值为:0~15,即4bit就够了,那么从20往前数,也就是[23:20],那么SQR1中这几位的用途是什么呢?顺这条线索我们去找SQR1中的23:20位,看它是怎么用的。
位23:20 L[3:0]:规则通道序列长度
这些位定义了在规则通道转
0000:1个转换
0001:2个转换
……
1111:16个转换
也就是设置一次进行几个通道的转换,看来我们的理解完全正确。
*/
ADC_Init(ADC1, &ADC_InitStructure);
//通过前面一系列的设置,可以执行ADC_Init函数了。
/* ADC1 规则通道15(Channel15)配置(规则通道见文章开头)*/
ADC_RegularChannelConfig(ADC1, ADC_Channel_15, 1, ADC_SampleTime_55Cycles5);
/* 这个函数一共有4个参数,第一个是指定转换器,根据所采用的器件的不同,可以是ADC1,ADC2,ADC3;第二个参数是指定通道号;第三个参数是指定该通道在转换序列中第几个开始转换,第四个参数是指定转换时间
第一、二个参数不难理解,这里就不再多说了,看一看第三个参数。
先看一看这个函数的内容,它在stm32f10x_adc.c中,这是STM库提供的一个函数:
void ADC_RegularChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel, uint8_t Rank, uint8_t ADC_SampleTime)
{ 。。.。。.前面的不写了
/* For Rank 1 to 6 */
if (Rank 《 7) //这个Rand就是第三个参数
{
/* Get the old register value */
tmpreg1 = ADCx-》SQR3;
/* Calculate the mask to clear */
tmpreg2 = SQR3_SQ_Set 《《 (5 * (Rank - 1));
SQR3的值如下:
//#define SQR3_SQ_Set ((uint32_t)0x0000001F)
之所以用5去乘,看下图中的表格:ADC_SQ3中SQ1~SQ6每个都是占5位。
这下理解了:如果这个Rank是1,那么tmpreg2这个变量第[4:0]这5位将会是11111(即SQR3_SQ_Set的初始值:0x0000001f),如果Rank是2,那么tmpreg2这个变量的第[9:5]将会是11111,即tmpreg2将等于:0x00001f00,依此类推。
/* Clear the old SQx bits for the selected rank */
tmpreg1 &= ~tmpreg2;
/* tmpreg2取反再与,即清掉tmpreg1中相应的5位*/
tmpreg2 = (uint32_t)ADC_Channel 《《 (5 * (Rank - 1));
/*这次tmpreg2取的是通道值了,然后同相根据Rank的值左移5、10或更多位 */
tmpreg1 |= tmpreg2;
/* Store the new register value */
ADCx-》SQR3 = tmpreg1;
}
*/ 
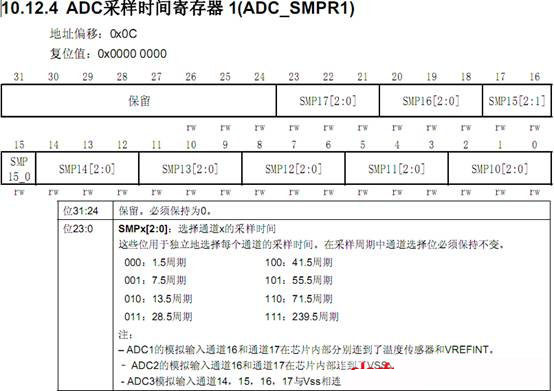
第四个参数是采样时间设定,代码如下:
tmpreg2 = (uint32_t)ADC_SampleTime 《《 (3 * ADC_Channel);
/* 设定新的采样时间,这里为什么用3,理由和上面的5一样,看下图。*/
tmpreg1 |= tmpreg2;
/* Store the new register value */
ADCx-》SMPR2 = tmpreg1;
/* Enable ADC1 DMA */
ADC_DMACmd(ADC1, ENABLE);
/* Enable ADC1 */
ADC_Cmd(ADC1, ENABLE);
至此一次ADC转换配置完毕。很麻烦。。.。。.也许功能强大的副产品就是麻烦吧,没有办法。
二、使用内置温度传感器测量温度
学习使用ADC多通道转换方式,验证温度测量的准确性,为以后的工程实践打好基础。
(1) ADC的单次与连续转换
ADC转换可以在一次转换后停止,然后再次触发后进行下一次转换;也可以是持续不断地转换下去。这个是通过设定ADC_CR2的CONT位来确定。
而在ST提供的库里面,是这样来设定的:
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
(2) ADC的扫描模式
ADC的扫描模式是用来扫描一组选定的通道的,它们将会被依次转换。这个在上一份笔记中已说明过。
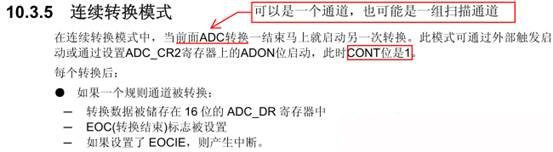
那么连续转换和扫描转换之间又是什么关系呢?字面上理解,似乎它们都是持续不断地转换啊。
答案是:连续转换的层次比扫描更高,它管着扫描呢。也就是说,对连续转换来说,它所谓的“一次转换”可并不是指的一个通道的转换结束,而是指的“一组”转换结束,当然,这个“一组”有可能只有一个通道而已。再说得明确一些:当ADC扫描一次结束以后,如果CONT位是“1”(设定为连续转换方式),那么将继续下一轮的转换。
(3) EOC什么时候产生?
我的理解应该是每个通道(Channel)转换结束时都会发生。但这里有些问题(见下图):

上面的说明中:该位由硬件在(规则或注入)通道组换结束时设置…其中有个“组”字,字面的理解似乎应该是指一次转换组的所有通道都结束后才置1?但如果是这样,那么又如何进行数据的传递呢?要知道,对于ADC1来说,它的多个通道只有一个用于数据何存的寄存器:ADC1-》DR啊。
而这个问题在其他两个地方也没有说得清楚(见下图):
我们前面讨论了说连续转换是针对一组转换而言的,所以这里所谓的:每个转换后EOC标志被设置,究竟是一组转换结束后呢还是一个通道结束后呢?不明确。
而在扫描模式是这么说的(见下图):
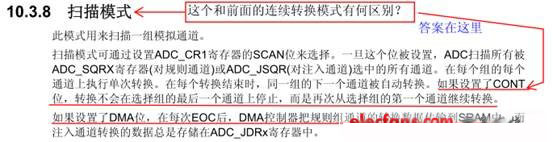
这里仅说到:如果设置了DMA位,在每次EOC后…,而并没有说到什么时候会有EOC产生?是所有扫描结束还是每个通道转换结束?
而关于SCAN位又有这样的说明(见下图):
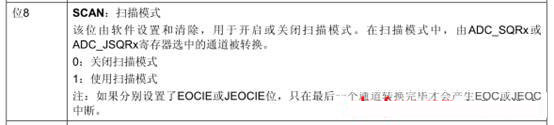
注意最后的注:如果分别设置了EOCIE或JEOCIE位,只在最后一个通道转换完毕才会产生EOC或者JEOC中断。
对这一行话的理解同样会有歧义:究竟是只在最后一个通道转换完毕才产生EOC或者JEOC呢,还是每个通道转换时都产生EOC或者JEOC,但是仅在最后一个通道转换完毕时的EOC/JEOC才会引发中断?
手册上说得清楚,手册不保证正确,有问题可以找英文原版……可怜我,如果汉语语法也搞不清楚,那么英语语法岂非更头大?看来非得进修个英文六级再来学啦。
还好,我们还能做实验验证。经验证,我认为应该是每次通道转换时都有EOC产生,并且这个EOC可以触发DMA事件。但是毕意自己验证的不能保证一定理解正确,所以啰啰喽喽写了这么多。
(4)为了要使用内置的温度传感器,得要先打开温度传感器(同时也打开了内部REF测量通道),数据手册上说是设置ADC-》CR2中的TSRVEFF位。这个位当然可以写个代码自行设置,不过我们现在是用库编程,那就遵守纪律,找到相应的库函数吧。
打开stm32f10x_adc.c,用尽一切手段找,在这里(见下图):
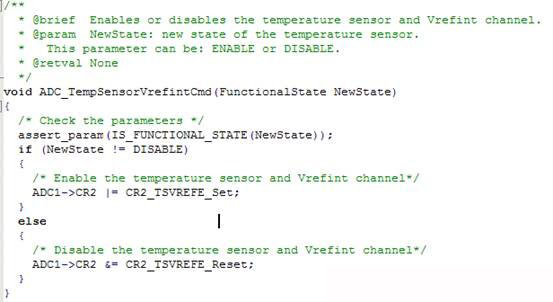
根据上次的解读,我们已知FunctionalState相当于是一个“位”变量,它只能取Enable和Disable两个值之一。
所以,main.c中加入这样一行:
ADC_TempSensorVrefiNTCmd(ENABLE); //开启温度传感器及Vref通道
(5)选定待转换组中的通道,并设定转换顺序,转换时间
ADC_RegularChannelConfig(ADC1, ADC_Channel_16, 2, ADC_SampleTime_239Cycles5);
/* 设置ADC1的Channel15通道在转换序列中第 2 个进行转换,转换时间设定为239.5个周期
*/
这一段中的第一个参数是指定由ADC1转换器转换,因为温度传感器接在这个转换器的第16通道上,第二个参数显然就是选定第16通道了,而第三个参数2是说这个通道第二个转换;第四个参数是设定采样时间。
说到采样时间,又要多说几句了。
ADC1转换器的时钟是ADCCLK,这个时钟是由APB2时钟经过分频器而得到的,由于代码中没有对预分频器进行设置,所以用默认值2分频,所以ADCCLK的时钟是36M。
对于温度传感器的使用,数据手册中这么样写(见下图):
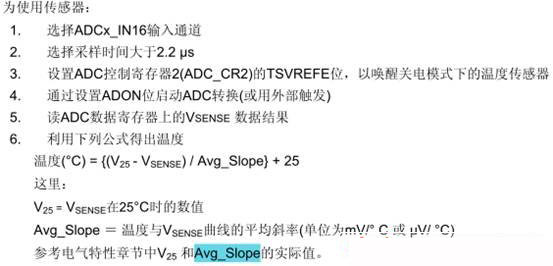
看第2条,即要求采样时间大于2.2us,那么我们只能取最大的采样周期239.5了。因为再低一档的就是71.5个周期,这是无法满足要求的。
但是说到这里,又出来问题了,就在紧挨着这段话的上面有这么一段(见下图):

也就是它要求采样时间是17.1us,这这岂不是明显不相符?
先标志于此,稍后查资料或做实验来验证。
(6)设置DMA通道,将转换得到的数据保存到SRAM中去。
vu16 ADCConvertedValue[2]; //定义一个2个字的数组,用来保存数据
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&ADCConvertedValue[0];
//设定SRAM中的起始地址
DMA_InitStructure.DMA_BufferSize = 2; //2个字节
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
//使用内存地址自增模式
……
其他的不多写了。这样,2个通道的测试数据分别被保存到ADCConvertedValue[0]和ADCConvertedValue[1]中去了,只要读出这两个单元中的值,就可以分别得到PC5(ADC_Channel15)上外接电位器的分压值和内部温度传感器的值了。
(7)第17通道Refint
在片内有一个片内基准,连接到ADC1的Channel17上,开始我以为,可以利用这个通道来做校准工作,但是看一看数据手册,我知道没戏了。
居然从1.16变到了1.24V。
而我实测的结果更令我叹息,开空调吹一下板子,实测的数值是1470,其时温度大概是在25度左右,空调一停,几度的变化,结果变成了1475,再试,我拿着板子对着空调出风口一阵吹,数值变到了1465.(其时温度值为从1700变到1753)虽然基准电压值的变化远没有温度值变化大,可…。一个是基准,一个是传感器啊。看来,非得用外部基准不可了。我的板子上VREF并没有用基准源,是通过一个简单的滤波电路接到VCC上的,这个基本上还算稳定,说明那个低压差稳压集成电路AMS1117的温度特性还是不错的。
最后,报告一下测试结果
(1) 室温下读到的温度传感器的输出为1700。
要将其转换成温度,还要找张表:(见下图)
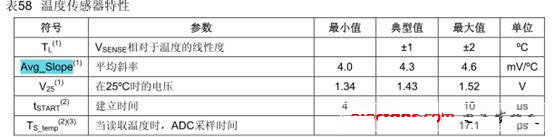
由于该表都是用电压来表示的,所以要将1700转换成电压值。
(1686/4096)*3.3=1.3583
那么温度就是:
T=(1.43-1.3583)/4.3*1000)+25
=14.03+25
=39度
(2)拿电吹风来,一阵吹,读数变为1550
电压值:(1550/4096)*3.3=1.2488V
再次计算:
T=(1.42-1.2488)/4.3*1000+25
=42.1+25
=67.1度
(3)开空调吹,读数变为1730,这个就不计算了,但是可以肯定数值变化趋势是对的了。
从第一个39这个值来看,测温的大体范围是对的,因为我在室内,估计当时的温度可能会有33~34度左右,这个39差了很多,原因:(1)V25和Avg_Slope都是取的中间值,这个未必对;(2)测量值和电压没有精确对照测量,估计误差也比较大。(3)是否与采样时间有关系?这个还要验证。
因此,如果某个应用中只是单独测温的话,这两点都要注意,要在生产后有个修正的表格,否则误差会比较大。
三、外部引脚中断使用
这里描述的仅仅只是诸多可能性中的一种,并不表示以下内容全部正确,因为Contex的中断和8位单片机的相比,真的是太复杂了。
我想要实现的功能
PD0,PD1,PD2作为输入管脚,使用它们的下降沿触发,分别令PD8,PD9,PD10管脚上的电平取反。
实现的过程
(1)管脚配置:这个不复杂,分别把PD0…PD2配置成Float Input,将PD8…PD10配置成推挽输出即可,这里不再写出源代码。
(2)外部中断线配置:
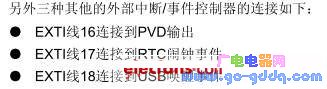
这里需要说明,在STM32内部有19条外部中断线,但是它们并不完全确定连接到哪些位置。其中EXTI0线可以和以下这些引脚连接:
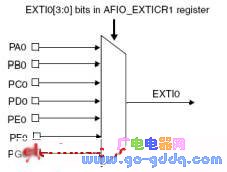
其他的就不一一列举了,16条线分别可能和一组I/O中的16条引线连接在一起。这是通过EXTIO[3:0]这组寄存器来设置的。那么用STM32的库编程的话,库函数是什么,在什么位置呢?(以 3.1.2库为例)
设置管脚与中断线连接的函数不在stm 32f10x_exti.c中,而是在stm 32f10x_gpio.c中。
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PINSource)
{……
}
参数是两个字节型变量,分别指定端口,及端口中指定的管脚,这些当然也是有预定义的。这些预定义在stm 32f10x_gpio.h头文件中。
下面给出的例子:
/*把PORTD 0,1,2三条引脚与EXT0,1,2分别相连*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource0) ;
GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource1) ;
GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource2) ;
看了例子,如果要配置其他的管脚,应该可以依葫芦画瓢了。
这样19条外中断线就清楚了。
(3)对EXTI各引线如何中断进行设置
这些先直接给出代码:
void Exti_Config(void)
{ EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0|EXTI_Line1|EXTI_Line2;
//哪些线将被配置
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
//中断模式还是事件模式
/*typedef enum
{
EXTI_Mode_Interrupt = 0x00,
EXTI_Mode_Event = 0x04
}EXTIMode_TypeDef;
*/
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
/*typedef enum
{
EXTI_Trigger_Rising = 0x08,
EXTI_Trigger_Falling = 0x 0C,
EXTI_Trigger_Rising_Falling = 0x10
}EXTITrigger_TypeDef;
可见,可选的模式有3种:上升沿触发、下降沿触发、上升沿和下降沿均触发
*/
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //中断线使能
如果没有这行,那么设置就无法进行了,看一看XTI_Init的代码:
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct)
{
……
if (EXTI_InitStruct-》EXTI_LineCmd != DISABLE)
{……各种设置都在下面的代码中进行,而执行到的条件是上面那行程序;
}
*/
EXTI_Init(&EXTI_InitStructure); //初始化中断
/*结构中该填写的内容都填写了,执行初始化程序*/
EXTI_GenerateSWInterrupt(EXTI_Line0|EXTI_Line1|EXTI_Line2);
/*
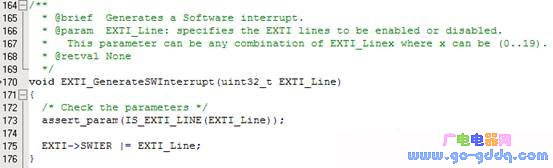
而EXTI_Line0、EXTI_Line1、EXTI_Line2的定义则在stm 32f10x_exti.h中
#define EXTI_Line0 ((uint32_t)0x00001) /*!《 External interrupt line 0 */
#define EXTI_Line1 ((uint32_t)0x00002) /*!《 External interrupt line 1 */
#define EXTI_Line2 ((uint32_t)0x00004) /*!《 External interrupt line 2 */
*/
所以综合起来,这么写就是允许这三条线中断
}
(4)还要对NVIC寄存器进行配置
void NVIC_Configuration(void)
{ NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
#ifdef VECT_TAB_RAM
/* Set the Vector Table base LOCation at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
/*上面的程序代码来自于ST的例子程序,下面是我自己写的,我不知是不是会让人笑掉大牙,但以我自己的理解能力,我暂时还就只能写出这样的代码来,这其中尤其对优先级和次优先级的设定,非常的没有把握
*/
/*允许EXTI0中断 */
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 7;//优先级设定
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //次优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //通道中断使能
NVIC_Init(&NVIC_InitStructure); //初始化中断
////允许EXTI1中断
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 7;//优先级设定
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //次优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //通道中断使能
NVIC_Init(&NVIC_InitStructure); //初始化中断
////允许EXTI2中断
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn; //中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 7;//优先级设定
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //次优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //通道中断使能
NVIC_Init(&NVIC_InitStructure); //初始化中断
}
此外,这里要提醒一点:
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn; //中断通道
这其中的:EXTI2_IRQn是新版本的库中所使用的符号,在2.0版本(也许还有其他版本)中,是这么样来写的:
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQChannel;
至此,配置工作完成。
随便找个st的例子程序,打开stm 32f10x_it.c可以看到里面已先写好了一些中断处理程序,如:

如果是51单片机的话,会有个关键字:interrupt 后加个数字来说明究竟是哪一级中断,这样,中断函数的名字可以随便起。可是,这里看来,这些函数就像是普通的函数,并没有什么特别的,那么我们要增加的3个中断处理函数起什么名字呢?这回用到的工具是:Fined in File,就是下面的对话框:
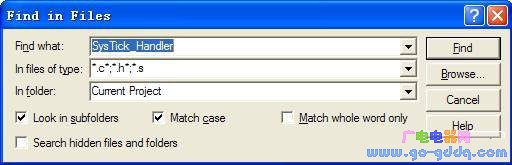
以SysTick_Handler为关键字在文件中搜一下,找到线索了,原来在这里:
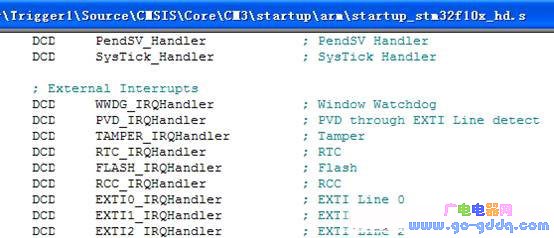
那么我们在stm 32f10x_it.c中写上:
void EXTI0_IRQHandler(void)
//这个就是处理外中断线0(目前连到PD0上)中断的代码的
{ /* Clear EXTI0 bit */
EXTI_ClearITPendingBit(EXTI_Line0); //0.17US
GPIO_WriteBit(GPIOD, GPIO_Pin_8, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOD, GPIO_Pin_8))); //0.5US
}
余者不多言,相差无几。
至此,该解决的问题都已解决,下面就运行一下,看一看效果了。
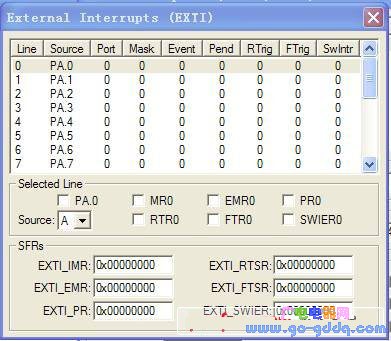
进行软件仿真,打开Peripherals-》External Interrupt,可见下面的图:
单步执行到所有设置代码完成,可以看到变成这样:
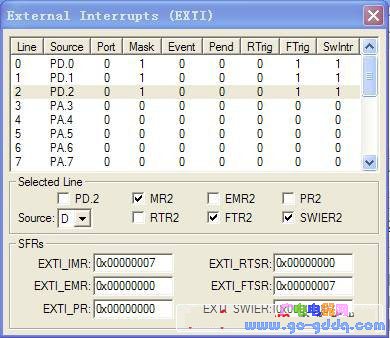
这里的变化,对照着数据手册上的变化,可以一一解读,并不困难,这里就不再说明了。
接下来的软件仿真和硬件测试都能够达到当初的设计目标,但程序是否最优,是否存在着不合理之处,很不好说,因为STM32的中断实在是够复杂的。这个留着后面继续学习的螺旋式上升中提高吧!
四、数据的保存与毁灭-BKP功能
通过STM32库自带的例子来做,就是这个:

通过研究,大体明白了BKP的功能,简述如下:
1. BKP可以用来保存数据
BKP中包括了42个16位的寄存器,共可保存84字节的内容,它们由VBAT的供电来维挂。
2. BKP内保存的数据可以被毁灭(如果有人希望恶意得到这些数据的话,令其丢失比保护数据更重要)。STM32提供了一种称之为TAMPER的机制来完成。中文译为“侵入检测”,这需要占用一个外部引脚(PC13)。
3. 如果不用侵入检测功能,那么这个外部引脚可以用作RTC校准功能,这个稍后再研究。
4. 当有系统复位/电源复位/待机模式下被唤醒这三种情况时,BKP中的值不会丢失或被复位。
先回来研究一下STM32的复位机制。以下是数据手册的相关部分。
6.1 复位
STM 32F10xxx支持三种复位形式,分别为系统复位、上电复位和备份区域复位。
6.1.1 系统复位
系统复位将复位除时钟控制寄存器CSR中的复位标志和备份区域中的寄存器以外的所有寄存器
当以下事件中的一件发生时,产生一个系统复位:
1.NRST管脚上的低电平(外部复位)
例如:按下板子上的RESET按钮就产生一个外部复位(属于系统复位)
2.窗口看门狗计数终止(WWDG复位)
3.独立看门狗计数终止(IWDG复位)
4.软件复位(SW复位)
5.低功耗管理复位
可通过查看RCC_CSR控制状态寄存器中的复位状态标志位识别复位事件来源
以下是RCC_CSR的内容:


调试时不太容易区分,以下是某次调试中截到的RCC_CSR数据。

6.1.2 电源复位
当以下事件中之一发生时,产生电源复位:
1. 上电/掉电复位(POR/PDR复位)
2. 从待机模式中返回
电源复位将复位除了备份区域外的所有寄存器。(见图3)
图中复位源将最终作用于RESET管脚,并在复位过程中保持低电平。复位入口矢量被固定在地址0x0000_0004。更多细节,参阅表36。
检测可以是否上电/掉电复位可以用以下的函数:
RCC_GetFlagStatus(RCC_FLAG_PORRST)
其中RCC_FLAG_PORRST也可以被替代成以下的一些符号,以检测不同的内容:

**************************************************************************
5. 如果必须要人为地令备份域复位(所有数据都被清零),那么有两种方法:
a) 软件复位(操作RCC_BDCR中的BDRST位产生。);以下是RCC_BDCR中相关的内容:
6.3.9 备份域控制寄存器 (RCC_BDCR)


b) VDD和VBAT均掉电,那么在VDD或都VBAT上电时将引发备分域复位(这是为了保护数据的完整性?)
6. 数据寄存器究竟是哪些呢?

那么在STM32提供的库里又是如何来用这些寄存器的呢?我们找一找,在stm 32f10x_bkp.c中,代码如下:
/**
* @brief Writes user data to the specified Data Backup Register.
* @param BKP_DR: specifies the Data Backup Register.
* This parameter CAN be BKP_DRx where x:[1, 42]
* @param Data: data to write
* @retval None
*/
void BKP_WriteBackupRegister(uint16_t BKP_DR, uint16_t Data)
{
__IO uint32_t tmp = 0;
/* Check the parameters */
assert_param(IS_BKP_DR(BKP_DR));
tmp = (uint32_t)BKP_BASE;
tmp += BKP_DR;
*(__IO uint32_t *) tmp = Data;
}
即只需要提供两个参数,第一个是BKP地址,第二个是数据,两个都是16位的数据。第二个参数没有问题,第一个参数如何提供呢?看例子中的代码:
/**
* @brief Writes data Backup DRx registers.
* @param FirstBackupData: data to be written to Backup data registers.
* @retval None
*/
void WriteToBackupReg(uint16_t FirstBackupData)
{
uint32_t index = 0;
for (index = 0; index 《 BKP_DR_NUMBER; index++)
{
BKP_WriteBackupRegister(BKPDataReg[index], FirstBackupData + (index * 0x 5A));
}
}
从上面的代码可以看到,第一个参数是用
BKPDataReg[index]
来提供的,这个又是什么东西呢?再找:
uint16_t BKPDataReg[BKP_DR_NUMBER] =
{
BKP_DR1, BKP_DR2, BKP_DR3, BKP_DR4, BKP_DR5, BKP_DR6, BKP_DR7, BKP_DR8,
BKP_DR9, BKP_DR10, BKP_DR11, BKP_DR12, BKP_DR13, BKP_DR14, BKP_DR15, BKP_DR16,
BKP_DR17, BKP_DR18, BKP_DR19, BKP_DR20, BKP_DR21, BKP_DR22, BKP_DR23, BKP_DR24,
BKP_DR25, BKP_DR26, BKP_DR27, BKP_DR28, BKP_DR29, BKP_DR30, BKP_DR31, BKP_DR32,
BKP_DR33, BKP_DR34, BKP_DR35, BKP_DR36, BKP_DR37, BKP_DR38, BKP_DR39, BKP_DR40,
BKP_DR41, BKP_DR42
};
原来最终还是用BKP_DR**这样的格式来用的,其中的**代表的序号。即 5.4.1中的x。
7.复位后,对备份寄存器和RTC的访问被禁止,并且备份域被保护以防止可能存在的意外的写操作。执行以下操作可以使能对备份寄存器和RTC的访问。
● 通过设置寄存器RCC_APB1ENR的PWREN和BKPEN位来打开电源和后备接口的时钟
以下是相关代码:
RCC_APB1PeriphCLOCkCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
这个没有什么可说的,关于打开时钟,前面已多次涉及到。
● 电源控制寄存器(PWR_CR)的DBP位来使能对后备寄存器和RTC的访问。
以下是相关代码:
PWR_BackuPACcessCmd(ENABLE);
代码本身相当简洁,不过我们还是再深入一点点。
这个PWR_BackupAccessCmd代码如下:(在stm 32f10x_pwr.c文件中)
/**
* @brief Enables or dISAbles access to the RTC and backup registers.
* @param NewState: new state of the access to the RTC and backup registers.
* This parameter can be: ENABLE or DISABLE.
* @retval None
*/
void PWR_BackupAccessCmd(FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_FUNCTIONAL_STATE(NewState));
*(__IO uint32_t *) CR_DBP_BB = (uint32_t)NewState;
}
而CR_DBP_BB在这里(stm 32f10x_pwr.c文件中):
/* Alias word address of DBP bit */
#define CR_OFFSET (PWR_OFFSET + 0x00)
#define DBP_BitNumber 0x08
#define CR_DBP_BB (PERIPH_BB_BASE + (CR_OFFSET * 32) + (DBP_BitNumber * 4))
8.一番探索,暂告一段落。由于我的板子与EVAL板略有不同,4个发光管分别接GPIOD的8,9,10和11引脚,所以在程序中做了如下改动(stm3210e_eval.h文件中):
#define LEDn 4
#define LED1_GPIO_PORT GPIOD
#define LED1_GPIO_CLK RCC_APB2Periph_GPIOD
#define LED1_GPIO_PIN GPIO_Pin_8
#define LED2_GPIO_PORT GPIOD
#define LED2_GPIO_CLK RCC_APB2Periph_GPIOD
#define LED2_GPIO_PIN GPIO_Pin_9
#define LED3_GPIO_PORT GPIOD
#define LED3_GPIO_CLK RCC_APB2Periph_GPIOD
#define LED3_GPIO_PIN GPIO_Pin_10
#define LED4_GPIO_PORT GPIOD
#define LED4_GPIO_CLK RCC_APB2Periph_GPIOD
#define LED4_GPIO_PIN GPIO_Pin_11
然后在板子上将JP6插到VBAT端,并且为板子上现成的电池座中装入一块电池。
执行程序,结果是LED4亮(程序运行)LED1和LED3灯点亮,其含义如下:
(1. LD3 on / LD1 on: a Power On Reset occurred and the values in the BKP data registers are correct)。
按下复位按钮后,LD1,LD2,LED3均灭,其含义如下:
(3. LD3 off / LD1 off / LD2 off: no Power On Reset occurred)
上一篇:在线仿真器在嵌入式系统设计中的应用
下一篇:基于ARM微处理器的嵌入式温度调节器设计
推荐阅读最新更新时间:2024-03-16 15:54

 汽车工程手册(美国版)D.A.柯尔
汽车工程手册(美国版)D.A.柯尔 Pico W5500 EVB TCP Server服务器创建及抓包分析
Pico W5500 EVB TCP Server服务器创建及抓包分析 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号