音响器材绝少不了音量控制器!音量控制器通常是一个可变电阻,用电阻分压电路将输入讯号衰减下来,达到控制音量的目的。
传统的音量控制器通常是用碳膜或金属皮膜电阻制作成片状,以具有弹性的接触片在片状电阻上滑动。如果是二声道或四声道的音响,便须要使用双联或四联的联动型可变电阻才行。
基于传统可变电阻的种种问题,使用开关来取代可变电阻,做为音量控制器是一个很不错的解决方案!毕竟,开关接点的阻抗远远小于音量控制的分压电路的阻抗,就算用久了接点会有些磨损,也只是接点阻抗稍有变化而以,并不至于会影响分压电路的比例。

用精密的固定电阻做成分压电路,每一级的分压比例都可以很精确,完全解决传统可变电阻联动误差的问题。通常,级进音量控制器是由23段旋转式波段开关构成。以其电阻的分压方式,可分成串列型Serial Type、梯子型Ladder Type和分流型Shunt Type。
接下来,我就介绍一下10K/100K Ladder Type 音量控制器加工步骤:
1、将23段旋转开关由位置1顺时针转半圈(约 11~12 格)。开关弹片位置不要在位置1上,以免弹片在焊圆焊针时使接点歪掉。
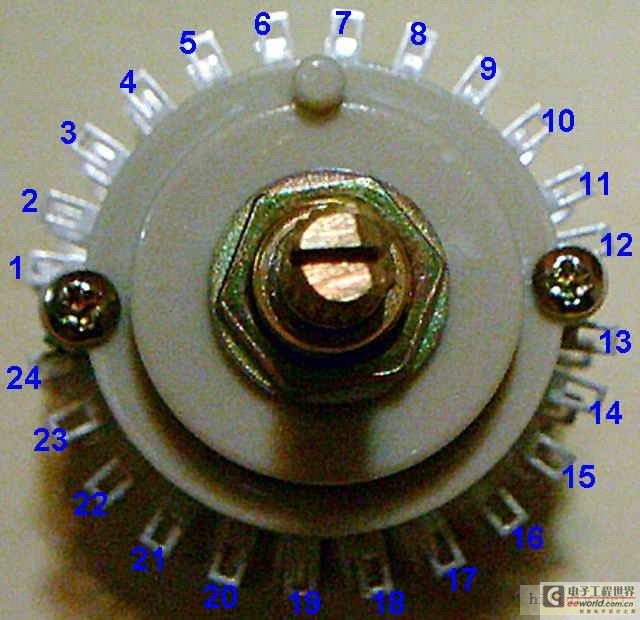
2、焊圆焊针,将圆焊针下方连凸起的部分用钳子夹扁一些,套在开关的接点上,剪一小段銲锡插入圆焊针的洞内,然后用烙铁加热,让焊锡在圆焊针内部熔化,跟开关的接点焊接起来(动作要快以免塑胶融化):


3、将开关四层接点靠中间的两圈接点从孔的中间偏上一点剪断,位置1的接点不剪。
 [page]
[page]
4、焊位置23及OUT 接点的跳线。

5、修剪所有Ra(两端引脚为1mm):

6、依序焊上Ra。位置1的电阻焊在位置24上,然后焊跳线连接到位置1。

7、用电表欧姆档(10K的VR为20K档,100K的VR为200K档),探棒一个夹在圆焊针IN,另一个夹在圆焊针OUT,转动开关,由位置1顺时针转,测量每一个位置的电阻是否焊好,阻值是否由大到小。
8、依照阻值(100K的VR则为治具上阻值的十倍)标示,插上Rb。

9、铜线先在瓶口绕成圆圈,一端折弯,套在治具上,圈住 Rb,铜线折弯的一端则插入治具的洞中。
10、朝外折弯 Rb 的引脚,压住铜线,将 Rb 銲在铜线上,由于要从外侧将电阻引脚剪平,所以尽量焊在内侧。
11、翻转治具,将电阻引脚与铜线剪成和治具齐平。
12、拔出焊好的电阻,将铜线上的电阻引脚从外侧剪成和铜线边缘齐平。[page]

13、套上圆形木片,对准中心点,折弯电阻引脚。

14、拆掉圆形木片,套上焊好Ra电阻的开关,对准位置焊上。(注意两圈电阻是对称的,位置不可弄错)
15、将折弯的铜线焊在GND 的圆焊针上。

16、焊上1/8W小电阻在铜线和 IN 圆焊针上。(10K VR小电阻为100K,100K VR小电阻为1M)
17、用电表欧姆档接 IN 和 GND 圆焊针,转动开关测量每个位置的阻值。10K VR每个位置阻值都在8.9K~9.1K之间,100K VR每个位置阻值都在 89K~91K 之间。
18、贴上标签。
19、套上垫圈,旋好螺母。
20、完成。

关键字:梯形 音量控制器 加工 DIY 音响 电路 制作
编辑:赵思潇 引用地址:10K/100K 梯形音量控制器加工DIY
推荐阅读最新更新时间:2023-10-12 20:18
复杂电路系统电源及PDS设计
现代大型集成电路,比如CPU、大型FPGA等消耗的电流往往达到数安到几十A,并且一些复杂系统电源种类繁多,因此电源系统的设计是否合理往往成为系统能否稳定工作的关键。电源系统的设计应该包含电源评估、电源供电电路设计和功率分布系统(Power distribution system 简称PDS)三个方面。本文分别探讨这三个方面的一般设计方法和思路。
一、电源评估 评估电源是电源系统设计的第一步,也是最重要的一步,决定了电源设计的成败。在设计电源的时候应该已经完成了整个系统的框图设计并基本选定了其中重要的IC芯片,这时我们需要参考数据手册Datasheet获得每一个IC的工作电压及消耗电流,并绘制下面这样一张表: 表一、 IC电源
[电源管理]

SRS5000系列高压差分探头更能准确的判断电路
SRS5000系列高压差分探头采用差分输入模式,主要用于需要进行高压浮地测量的场所。探头具备良好的共模噪声抑制能力,输入端具有较高的输入阻抗和较低输入电容,可以准确、高速地测量差分电压信号;其带宽可达 200MHz,非常适合高频驱动电路中的测试。 SRS5000系列高压差分探头采用全新电路,高阻抗低电容输入,采集到的数据均通过集成块处理,可以完整并真实的体现测试结果。是目前比较新颖的技术手段。下面用几张图片来展示测试效果: 这是一个高频驱动电路,上面这张图片是SRS5200测试出来的,可以说波形较为干净且较圆满。下面这张图片是用其他差分探头测试出来的,可以看到波形存在明显过冲。同样的电路用不同探头测试,出来
[测试测量]
CAN总线与以太网嵌入式网关电路设计攻略
提出一种工业现场总线与以太网互联方法,介绍以太网与CAN 现场总线之间协议转换网关的设计与实现,采用 AT89C55 ($1.4635) 作为主处理器,通过两个接口芯片实现CAN总线与以太网的互连,分别给出其硬件结构和软件设计思想。
目前,对于CAN 和以太网相连的嵌入式网关设计主要有两种方法:一种是低档MCU 加接口芯片的设计方法,另一种是高档MCU 加EOS(实时多任务操作系统)再加接口芯片的设计方法。因CAN 只采用了ISO/OSI 参考模型的一、二层,协议相对简单,比较适合用于低成本、速率要求不高的离散控制系统。从合理的成本和有效利用处理能力这两方面考虑,该设计采用低档MCU 加接口芯片的方法,其硬件框图见图。
[单片机]
高手打造智能无线供电台灯
无线供电是一个很吸引人的制作课题,许多电子类杂志和论坛上都有关于制作无线供电电路的介绍,这些电路虽各有千秋,但都有一个共同的不足之处,一是传输效率不太理想,二是不论有无接收器在工作,发射部分都一如既往地向外源源不断地发射能量,这是不能令人满意的。 笔者所设计的这个无线供电装置,除了传输效率比较高,它还有一个显著的特点:能自动检测有无接收部分工作,只有检测到确有接收器在工作,它才会连续辐射无线电能,否则就始终只工作在低能耗的检测状态。其工作方框图如图1所示: 发射部分采用CMOS电路与场效应管的组合,这种组合不仅效率高,而且控制也简单易行。发射线圈采用李兹线和蛛网式绕法,以取得较高的变换效率。电路见
[电源管理]
高效率、高调光比LED恒流驱动电路的设计方案
随着LED技术的发展, 大功率LED在灯光装饰和照明等领域得到了普遍的使用, 同时功率型LED驱动芯片也显得越来越重要。由于LED的亮度输出与通过LED的电流成正比, 为了保证各个LED亮度、色度的一致性, 有必要设计一款恒流驱动器, 使LED电流的大小尽可能一致。 基于LED发光特性, 本文设计了一种宽电压输入、大电流、高调光比LED恒流驱动芯片。该芯片采用迟滞电流控制模式, 可以用于驱动一颗或多颗串联LED。在6V~30V的宽输入电压范围内, 通过对高端电流的采样来设置LED平均电流, 芯片输出电流精度控制在5.5%, 同时芯片可通过DIM引脚实现模拟调光和PWM调光, 优化后的芯片响应速度可使芯片达到很高的调光比。
[电源管理]
RF电路中稳压器的PSRR和噪声
LDO是一种微功耗的低压差线性稳压器,它具有极低的自有噪声和较高的电源抑制比(PSRR)。SGM2007高性能低压差线性稳压器在10Hz至100kHz频率范围内的输出噪声为30µV(RMS),在1kHz的频率下电源抑制比(PSRR)高达73dB,它能够为诸如射频(RF)接收器和发送器、压控振荡器(VCO)和音频放大器等对噪声敏感的模拟电路的供电提供低噪声、电源纹波抑制比(PSRR)和快速瞬态响应,它的使能电路兼容TTL电平适合数字电路供电。SGM2007的输入电压在2.5V至5.5V之间,适合蓝牙数码相机和个人数字助理(PDA),以及诸如无线和高端音频产品等单个锂电池供电或固定3.3V和5V系统。 LDO
[电源管理]
采用FPGA语音识别系统电路设计
近年来,语音识别研究大部分集中在算法设计和改进等方面,而随着半导体技术的高速发展,集成电路规模的不断增大与各种研发技术水平的不断提高,新的硬件平台的推出,语音识别实现平台有了更多的选择。语音识别技术在与 DSP 、FPGA、ASIC等器件为平台的嵌入式系统结合后,逐渐向实用化、小型化方向发展。 本课题通过对现有各种语音特征参数与孤立词语音识别模型进行研究的基础上,重点探索基于动态时间规整算法的DTW模型在孤立词语音识别领域的应用,并结合基于FPGA的SOPC系统,在嵌入式平台上实现具有较好精度与速度的孤立词语音识别系统。 24位音频编解码设计 DE2 板提供了高品质24位Wolfson WM8731音频编解码芯片
[电源管理]
基于AT89C52自动追踪红外线源机器人电路设计
自动追踪红外线源机器人主要由三部分组成:红外线感应接收部分、微处理器和电机驱动部分。各部分功能:红外线感应接收部分检测载波频率为38kHz的红外线发射波;微处理器负责处理传感器输入的信号,并为电机驱动部分提供相应的方向控制信号;电机驱动部分驱动步进电机使机器人按照相应指令的方向前进。 红外线感应器选用小型红外遥控接收芯片TSOP1738,它支持所有主流的红外发射编码方式,单片机可以直接读取其解调后的信号;微处理器选用低功耗高性能的8位单片机AT89C52;单片机的I/O口输出电流不具备直接驱动步进电机的能力,因此步进电机的驱动选用具有8路达林顿对管的ULN2003;当红外线发射源位置不断变化时,红外线传感器TSOP17
[单片机]


 西电-印刷电路板(PCB)设计指南_1-99
西电-印刷电路板(PCB)设计指南_1-99 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号