驱动系统与无刷电机的特性有着密切的关系,人们已经采用各种方法来改善电机的可控性和特性。在本文中,我们将解释两种典型的驱动系统:方波驱动和正弦波驱动。
电机驱动系统
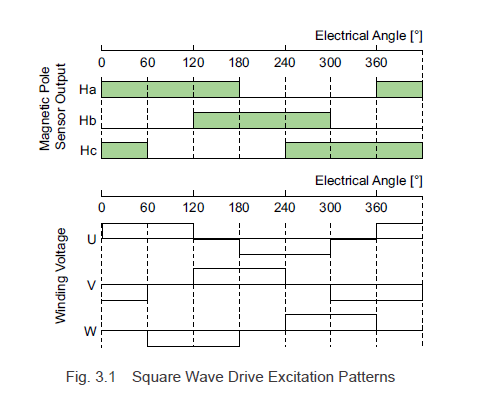
3.1.1 方波驱动系统(120°导通方式)
无刷电机驱动系统有很多种,120°导通方式的方波驱动就是一个常见的例子。如图 3.1 所示,该方法涉及根据霍尔效应 IC 输出信号的组合来切换激励状态。虽然在低速运行期间会出现速度纹波,但可以通过简单的电路实现高输出功率。因此,它被广泛用于控制办公自动化设备和功率设备的无刷电机。
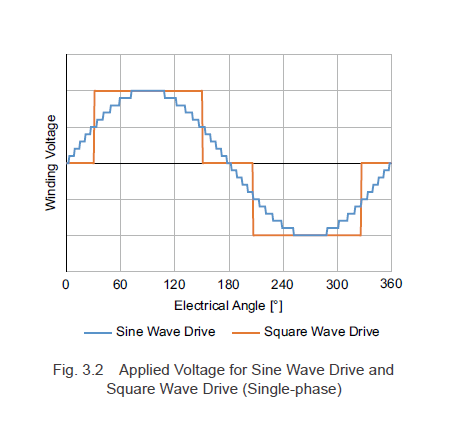
3.1.2 正弦波驱动系统
如图 3.2 所示,正弦波驱动系统是对施加电压进行精细控制,使电机电流呈正弦波的驱动系统。该驱动系统具有少量扭矩波动并允许稳定旋转。此外,它还降低了驱动电机时产生的噪音。
然而,为了进行正弦波驱动,需要准确地检测转子磁极位置。传统上,需要高分辨率编码器,但这有增加电机总长度和成本的缺点。
近年来,而不是使用编码器:
软件已用于处理霍尔效应 IC 信号。
因此,现在可以使用各种其他方法检测磁极位置并执行正弦波驱动。
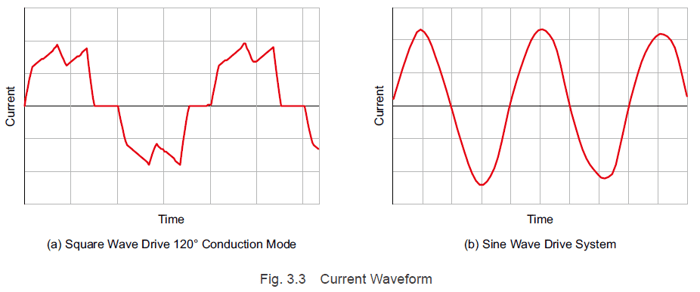
3.1.3. 每种驱动系统的电流波形
实际电流波形如图 3.3 所示。方波驱动器相对于施加的电压波形具有失真,实际上它在形式上比方波更接近正弦波。正弦波驱动器的波形类似于外加电压波形。
在接下来的几篇文章中,我们将解释驱动系统如何影响电机的性能。
上一篇:无刷电机的主要部件
下一篇:无刷电机驱动系统和电机转矩详解
推荐阅读最新更新时间:2024-11-06 20:31
技术文章—风门执行器在汽车HVAC系统中的驱动因素

无论在酷暑还是寒冬,乘客始终可以通过汽车的加热和制冷系统享受到舒适的车内环境。在不同类别的车辆中,这些暖通空调(HVAC)系统的复杂性和自动化程度也各不相同。经济型汽车可能需要驾驶员手动旋转旋钮来控制温度,而在高端车辆中,则可以通过传感器同时自动控制车内的温度以及空气的湿度和质量。 空气流动 无论何种类别的车辆,汽车HVAC系统都需要交换空气,并在此过程中改变其温度、湿度和质量。 让我们来看一下空气流动的原理。空气可以从车厢外部或内部吸入系统。也可以通过蒸发器或换热器进入HVAC系统以进行调节;经过调节的空气分布在整个车厢内,让乘客脚部保暖,或者防止挡风玻璃起雾。 空气流动的途径有很多种:从外部到蒸发器再到挡风玻璃
[汽车电子]

德州仪器推出集成型三相无刷电机前置驱动器
德州仪器集成型三相无刷电机前置驱动器可在驱动达 60 A FET 的同时,将板级空间锐减 60% 集成降压稳压器与双通道电流感应放大器,可缩小板级空间,降低材料清单成本与系统复杂性 日前,德州仪器 (TI) 宣布推出首款最新系列集成型三相无刷电机前置驱动器。该 DRV8301 是目前市场上集成度最高的前置驱动器,与性能最接近的集成解决方案相比可将板级空间锐减达 60%。它可驱动 10 A 以下至 60 A 的外部 FET,支持电流可扩展性、更高散热性能,以及无刷 DC(BLDC) 及永磁同步电机 (PMSM) 应用(如通风泵、医疗泵、商用冰箱制冷系统、机器人、电动工具、电动自行车以及其它大扭矩工业电机控制应用等)的更高效率。如
[工业控制]
最小正弦PWM的直流无刷电机控制方案
传统的直流无刷电机采用方波控制方式,控制简单,容易实现,同时存在转矩脉动、换相噪声等问题,在一些对噪声有要求的应用领域存在局限性。针对这些应用,采用正弦波控制可以很好的解决这个问题。 直流无刷电机的正弦波控制简介 直流无刷电机的正弦波控制即通过对电机绕组施加一定的电压,使电机绕组中产生正弦电流,通过控制正弦电流的幅值及相位达到控制电机转矩的目的。与传统的方波控制相比,电机相电流为正弦,且连续变化,无换相电流突变,因此电机运行噪声低。 根据控制的复杂程度,直流无刷电机的正弦波控制可分为:简易正弦波控制与复杂正弦波控制。 (1)简易正弦波控制: 对电机绕组施加一定的电压,使电机相电压为正弦波,由于电机绕组为感性负载,因此电机相电流也为
[嵌入式]
单片机的电动助力转向系统驱动电路设计
1 EPS系统基本结构及工作原理 电动助力转向系统(EPS,EleCTRIC Power Steering)是未来转向系统的发展方向。该系统由电动机直接提供转向助力,具有调整简单、装置灵活以及无论在何种工况下都能提供转向助力的特点。EPS最为突出的是该系统可在不更换系统硬件的情况下,通过改变控制器软件的设计,十分方便地调节系统的助力特性,使汽车能在不同车速下获得不同的助力特性,以满足不同工况下驾驶员对路感的要求。 电动助力转向系统(EPS)主要包括传感器、控制器和执行器三大部件。传感器将采集到的信号经过相应处理后输人到控制器,控制器运行内部控制算法,向执行器发出指令,控制执行器的动作,系统结构如图1所示。其工作原理
[单片机]
汽车驱动防滑系统(ASR)简介
1.ABS/ASR系统
目前,汽车的制动、加速和转向仍是需由驾驶员完成的基本作业。当路面的附着状况不好或交通状况突然改变时,就要求驾驶员有熟练的驾驶技术来很好地适应行驶条件的变化。
前边所述的制动防抱死系统,在制动方面解脱了对驾驶员的高要求。驱动防滑控制系统则是在行驶方面、加速方面解脱对驾驶员的高要求。
驱动防滑系统是汽车制动防抱死系统功能的自然扩展,它的作用是维持汽车行驶时的方向稳定性,并尽可能利用车轮—路面间的纵向附着能力,提供最大的驱动力。
当驾驶员在光滑路面上过分踩下油门时,会造成车轮的过分滑转,驱动防滑装置通过自动施加部分制动或减少发动机功率输出的方式可使车轮的滑动率保持在最佳范围内,由此可防止驾驶员过分
[嵌入式]
LED灯具智能驱动系统设计
0 引言 LED照明是全球节能的主流,而大功率LED 照明更是今后世界的照明发光系统的主流趋势。大功率LED具有亮度高、节能环保、安全性和稳定性高等特点,比传统光源节电60% ~ 70%. 传统的声光控延时控制器能很好地实现对灯的控制,在光线黑暗时或晚上来临时,能有效地实现"人来灯亮,人去灯熄" , 但由于其开关用的是继电器之类的机械控制器,所以在人流量多的地方由于频繁的开关,较容易损坏。 根据市场上的现有的大功率LED射灯产品,设计了可应用于走廊、楼梯、教室等场所的智能照明系统。 该系统采用24 V /3 A 开关电源供电,下级可分布多路LED智能照明模块(见图1)。控制器采用AT89C2051,恒流
[电源管理]
一款无刷电机控制器DIY设计方案
很早之前就想做一款无刷电机控制器,忙于工作一直没有弄。最近有点时间画板,打样,焊接,调试,总算顺利的转起来。期间也遇到很多问题,上网查资料,自己量波形前前后后搞了差不多近一个月,(中间又出差一周)总算搞的差不多了,特意写个总结。 板子外观100*60mm 中等大小。DC 12V输入,设计最大电流10A.(实际没试过那么大的电机,手头的电机也就5 6A的样子)硬件上可以切换有感(HALL)和无感(EMF)两种模式,外部滑动变阻器调速 预留有 PWM输入、刹车、正反转、USB和uart等接口。 先来说下原理无刷电机其实就是直流电机,和传统的DC电机是一样的,只是把有刷的电滑环变成了电子换向器。 因为少了电滑环的摩擦所以
[嵌入式]
常见电机控制算法
01 BLDC电机控制算法 无刷电机属于自换流型(自我方向转换),因此控制起来更加复杂。 BLDC电机控制要求了解电机进行整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。 BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。这就提供了最高的分辨率。如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。 为了感应转子位置,BLDC电机采用霍尔效应传感器来提供绝对定位感应。这就导致了更多线的使用和更高的成本。无传感器BLDC控制省去了对于霍尔传感器的需要,
[嵌入式]
 伺服与运动控制系统设计 (田宇编著)
伺服与运动控制系统设计 (田宇编著) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
小广播
推荐内容





热门活动
换一批
更多
最新嵌入式文章

更多开源项目推荐
- 使用 Analog Devices 的 LTC1046IS8 的参考设计
- EVAL-AD7194EBZ,用于 AD7194、4.8 kHz、超低噪声、24 位 Sigma-Delta ADC 的评估板
- AM1DR-2403SZ 3.3V 1 瓦 DC-DC 转换器的典型应用
- TC650DEMO,使用 TC651 PWM 风扇电机控制器的风扇控制演示板
- ZXTR2008K 100V输入、8.2V 50Ma稳压管典型应用
- 使用 Microchip Technology 的 LX24132AILQ 的参考设计
- 使用 Analog Devices 的 LTC1148 的参考设计
- 用于完整 3V、12 位、1MHz 模数转换系统的 AD8604ARZ-REEL 运算放大器的典型应用
- LT8714EFE 300kHz、5V 输入的典型应用电路产生 -2.5V 至 2.5V 输出,提供 -5A 至 5A 的输出电流同步 PWM 控制器
- 使用 ON Semiconductor 的 CAT871-10ULGT3 的参考设计
更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月13日历史上的今天
厂商技术中心






 京公网安备 11010802033920号
京公网安备 11010802033920号