1 引言
利用硬件描述语言结合可编程逻辑器件(PLD)可以极大地方便数字集成电路的设计,本文介绍一种利用VHDL.硬件描述语言结合现场可编程门阵列(FPGA)设计的数控延时器,延时器在时钟clk的作用下,从8位数据线输入延时量,到IATCH高电平时锁存数据,可以实现对触发脉冲TRIG的任意量的延时。由于延时范围不同,设计所用到的FPGA的资源也不同,本文详细介绍最大延时量小于触发脉冲周期的情况。该延时器的软件编程和调试均在Muxplus II环境下完成,系统设计选用Altera公司的EPFl0K30AQC208-3,EPC1441型专用电路,与DSP相结合,应用于雷达目标模拟器的控制部分,实现对目标距离的模拟。
2 设计原理
笔者设计的数控延时器采用3个串联计数器来实现。由于在触发脉冲TRIG的上升沿开始延时,使用时钟的上升沿计数,考虑到VHDL对时钟描述的限制,设计采用计数器1产生同步脉冲SYNC,宽度为Tclk,利用SYNC的高电平触发cflag,并在延时结束后cflag清零;计数器2计算延时的长度;计数器3计算所要产生的输出脉冲OUTPUT的脉宽,并在计数结束时对计数器2和计数器3清零。延时器的外部接口电路如图1所示,原理框图如图2所示。整个电路的设计采用同步时钟计数以尽量减少因局部时钟不稳定所产生的毛刺和竞争冒险。
该数控延时器低电平时锁存数据,高电平时改变内部寄存器的数值(与AD9501型数控延时器的数据锁存端电平相反)。一般情况下,触发脉冲与时钟的上升沿是一致的,如果输入的触发脉冲与时钟不一致.则整个电路的延时将产生一定的误差。时序仿真如图3所示,延时量由dlyLH为高电平时数据总线data8上的数据决定。
该数控延时器的VHDL硬件描述语言程序如下:



在该程序中,cnt1为延时量,cnt2为输出脉冲的宽度,cflag为开始计数的标志。该段程序在触发脉冲的周期大于256*Tclk时,最大延时量为256*Tclk,如果触发脉冲周期小于256*Tclk,则最大延时量为Tclk一Toutput (Toutput为输出脉冲的宽度)。
事实上。在实际应用中,延时后的输出脉冲与输入的触发脉冲的频率并不相同,譬如在设计雷达目标模拟器时要求延时后产生一连串的7分频时钟,时序如图4所示(延时后产生11个7分频的脉冲,占空比为2:5)。
要产生上述触发脉冲,只需改变计数器2的长度,并在程序中加入case判断语句即可。

3 延时范围讨论
3.1 延时范围小于触发脉冲周期
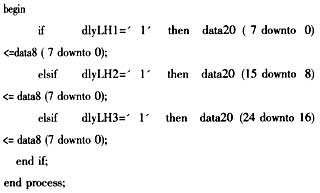
这种情况只需增加数据输入端的位数,不过一般情况下,数据输入端位数是固定的,这时可以在FPGA的内部定义多位的数据寄存器。以延时范围为224*Tclk为例,在FPGA内部定义24位的数据寄存器,并定义3条地址线dlyLH1、dlyLH2和dlyLH3,通过8位数据总线分3次向数据寄存器送数,送数时间应在前一脉冲延时结束之后与下一脉冲到来之前。数据送入寄存器的程序如下:
3.2 延时范围大于触发脉冲周期
这种情况在实际应用中比较广泛.譬如在雷达模拟器的设计中,所模拟的目标的距离范围一般都很大.因而输出延时脉冲的延时量将大于1个触发脉冲周期,这时在考虑到FPGA资源的前提下.可以采用多路延时合并的处理方法。以延时范围小于4个周期为例,具体时序如图5所示。
利用SYNC信号4分频并产生4路分频后的信号。在FPGA内部设计4个延时电路,SYNC1、SYNC2、SYNC3、SYNC4分别作为4个延时电路的触发信号,每个延时电路仿照第一种延时范围的设计方法,输出触发脉冲通过4个或门送到输出端OUTPUT,值得注意的是每个延时电路内部都要定义1个与DATAREG位数相同的数据寄存器。延时数据在延时开始时送入内部寄存器。使用多路延时合并方法最关键的是要产生准确的分频脉冲.如果产生的脉冲有毛刺.或者电路在设计的时候存在冒险,整个延时系统有可能都不能正常工作。
4 延时误差分析
以延时范围小于触发脉冲周期为例,分析固定延时及延时误差。
该延时器在Muxplus II环境下从输入时钟Tclk到dlytrig的延时为8.2 ns;产生SYNC的宽度为Tclk。因此在触发脉冲上升沿与时钟信号上升沿对时.该延时电路的固有延时为8.2 ns+2Tclk。但一般情况下.触发脉冲的上升沿与时钟的上升沿并不是一致的,根据二者之间的关系可知,最大延时误差T满足:0
由于该数控延时器使用时钟来计数,因此延时量只能为Tclk的整数倍。如果设计者希望有更精确的延时.可以在设计的基础上外加一片AD9501,该器件的延时可以精确到(Ttotal+Td)×1/28,其中Ttotal是AD9501的总延时,Td是AD9501的固有延时。
5 结束语
本文详细介绍了利用VHDL硬件描述语言结合FPGA设计一种数控延时器的方法,讨论了延时范围,分析了延时误差,该延时器的设计旨在和DSP相结合实现对延时信号的处理。随着EDA技术的飞速发展。使用硬件描述语言设计FPGA是电子设计人员应该掌握的一门技术。同时,将DSP和FPGA技术相结合是进行数字信号处理的一种趋势。
引用地址:
基于现场可编程门阵列的数控延时器的设计
推荐阅读最新更新时间:2024-05-02 20:26
“0风阻”RoboSense激光雷达,助力智己LS6首发
【中国成都,2023年8月25日】 智己汽车首款全球车型“中大型智能轿跑 SUV” 智己 LS6,正式亮相成都国际车展,迎来全球首秀;同步开启盲订,预售价格区间23万-30万元。智己LS6配备RoboSense M系列激光雷达,得益于M系列激光雷达超小巧的外形和智己超低风阻美学的水滴型设计,顶置激光雷达部署首次实现对整车“0风阻”影响,帮助LS6达成0.237Cd的超低风阻系数。 M系列激光雷达对智己LS6整车“0风阻”影响,帮助LS6达成0.237Cd的超低风阻系数 智己LS6是智己汽车高端智能平台的产品,搭载智能驾驶、三电、智舱交互领域的百余项最新尖端科技。智己LS6配备IM AD智能驾驶系统,首创的「一键AI代
[汽车电子]

FPGA攻城掠地 驾驶辅助和倒车雷达展实力
汽车驾驶辅助系统需要更高阶的嵌入式处理架构,因应汽车多媒体影音的多元应用,汽车驾驶辅助系统的嵌入式处理架构,需兼顾提升效能、降低成本和功耗、缩小尺寸、以及提升灵活性的设计要点。
汽车驾驶辅助系统涵盖面相当广泛,举凡车道偏离警告系统、盲点侦测、自动巡航控制、自动停车、防撞侦测等,需要整合复杂的系统输入驱动功能。例如红外线和雷达转换器以及摄影镜头,都需要强大的即时数位讯号处理效能,便进行元素分析,进一步驱动通讯、控制系统和显示等处理应用。
因此,汽车驾驶辅助系统的嵌入式处理架构,要能够突破既有讯号处理效能延迟的限制,兼顾复杂的系统介面输出入讯息,并且取代多晶片建置在成本、功耗和尺寸上的弱点,同时
[嵌入式]
量产大潮下的激光雷达,正在迎来「光变」时刻
在刚刚召开的上海车展上,智能化已然成为全场关注的焦点。 无论是合资品牌、自主品牌,还是国内新势力,都在借这个窗口展示其智能化发展成果,不仅有海量新产品发布,还带来了不少改款车型,完美呼应了这次车展「拥抱汽车行业新时代」的主题。 与此同时,这也带动着智能驾驶供应商们纷纷「焕新」, 激光雷达 厂商就是其中之一。 这里有一大背景是,激光雷达正在迎来上车大爆发。 2022 年,禾赛、速腾、图达通、探维科技等头部激光雷达公司纷纷拿下主机厂的项目定点,宣告行业正式进入量产阶段。 随之而来的挑战是在满足性能指标、车规可靠性和量产交付质量一致性等诸多前提约束下达成成本控制目标,尤其是在车市价格战异常激烈、智能驾驶开始回归理性的
[汽车电子]
国内首家单芯片微波雷达供应商隔空科技完成了B轮融资
12月2日,宁波隔空智能科技有限公司董事长林水洋向集微网记者表示,隔空科技正式完成B轮融资。 据悉,本轮融资由英特尔资本领投,临芯资本、国科投资跟投,老股东小米长江产业基金继续跟投。林水洋向集微网记者表示,该轮融资主要用于公司现有主打芯片产品的扩大生产及全球客户的加速拓展,研发团队扩充以及新产品线的布局。 隔空科技专注于高性能无线射频、微波、毫米波技术、触控交互技术及低功耗MCU技术,定义并研发世界领先的“Me First”芯片产品,提供高性价比的芯片、算法、软件及模组全套解决方案。已推出的5.8GHz、10.525GHz,并即将推出60GHz单芯片雷达传感器产品,以及低功耗触控、压控传感器等系列产品,被广泛应用于智能物联网(
[手机便携]
自动驾驶的激光雷达和纯计算机视觉对比分析
激光雷达流派和纯 计算机视觉 流派一直在 自动驾驶 技术中的感知层解决方案上喋喋不休。激光雷达派认为纯视觉 算法 在数据形式和精度上的不足;纯视觉流派则认为激光雷达不必要且过于昂贵。本文将对激光雷达、摄像头以及 毫米波雷达 等主流 传感器 、各自动驾驶 公司 的解决方案以及传感器市场格局作介绍。 特斯拉 CEO马斯克近日在“自动驾驶日”推出了全自动驾驶计算机”(full self-driving compu te r),即之前所说的Auto pi lot 硬件 3.0。 与上一代由 英伟达 芯片 驱动的Autopilot相比,新硬件每秒帧数处理能力提高了21倍,且相比Autopilot 2.5版本,每辆车的硬件成本降低约
[汽车电子]
基于MSP430F2274单片机的倒车雷达设计
随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。以往的倒车雷达设计使用的元器件较多,功能也较简单。本文介绍的基于新型高性能超低功耗单片机MSP430F2274的倒车雷达可以弥补以往产品的不足。 系统总体设计 系统采用超声波测距原理。超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。作为一种非接触式的检测方式,超声波具有空气传播衰减小、反
[单片机]
雷达料位计在水泥厂中的应用
雷达料位计是一种常用的检测仪器,在工业、化工、电力、船舶、机床、治金、石油等多个行业中都有一定的应用。其中雷达料位计在水泥厂中的应用也是非常广泛的,今天小编就主要来为大家具体介绍一下雷达料位计在水泥厂中的应用,赶快来看一下介绍吧。 物位是水泥工业生产过程的主要测量参数之一,和其他行业不同,在水泥工业中主要是固体物料的物位测量,液位测量则很少。固体物料种类繁多,有块料、颗粒状、粉料,这些物料的介电常数、容重、温度、水分含量也各不相同。接触式测量是过去测量物位的主要手段,如电容式、重锤式、音叉式、阻旋式等测量方法,由于测量时仪表和物料是接触的,在使用过程中往往会出现各种问题,如电容的挂料;重锤的断锤、埋锤;音叉的堵料等,且日常的维护量很
[测试测量]
浅谈成像雷达的重要性
为什么会提出雷达系统这个话题?每年,全球约有130万人死于交通事故,而在交通事故中受重伤人的更是多达几百万。雷达技术在高级辅助驾驶系统(ADAS)的应用至关重要,能够有效避免交通事故的发生并挽救生命。 全球各地出台了多项新规,并制定了地区性新车评估计划(NCAP)评级标准,推动了雷达的加速普及。例如,许多地区已颁布了相关法规或五星安全评级标准,强制要求车辆部署自动紧急制动、盲点检测及易受伤害道路使用者的检测等功能。 ADAS和自动驾驶的级别 汽车工程师协会(SAE)定义了 自动驾驶的6个级别,其中L0是无自动化 ,而ADAS正在逐步演变为驾驶员辅助、部分自动化、有条件自动驾驶,最终发展为全自动驾驶的L5级
[汽车电子]





 中国车载激光雷达市场洞察报告
中国车载激光雷达市场洞察报告 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用










 京公网安备 11010802033920号
京公网安备 11010802033920号