摘 要
基于UCD92xx 与UCD7xxx 的非隔离数字电源,其输出电压在软启动阶段经常出现“台阶”现象,波形不平滑,尤其是输出电压设定为较低值时,如1.0V。这种“台阶”现象与UCD92xx 软启动的设计原理有关,但完全可以通过一定的措施来优化并最终解决。本文从UCD92xx 的环路和最小占空比宽度两个方向进行优化与分析,最终取得了理想的效果。
1、软启动原理及待优化输出电压波形
数字电源UCD92xx 的软启动是通过对参考电压以步进方式增加来实现的,整个过程是由芯片内部的软件自动完成的。在一款基于UCD9224 和UCD74120 的单板上测试时发现,其输出电压波形在软启动阶段有明显的“台阶”现象,波形不平滑。
1.1 数字电源软启动原理介绍
图1 所示的是数字电源UCD92xx 的功率支路和控制支路。控制支路主要集成在UCD92xx 芯片内部,包含误差生成及模数转换,环路补偿,PWM计算及产生等。其中,参考电压(VREF)电压的设置亦包含在控制支路。
依据软件算法,在软启动阶段,VREF 每100us 增加一次,直至软启动完成,即输出电压达到最终的设定值。例如,输出电压设定为1.0V,软启动的时间设置为4ms,则在软启动阶段输出电压每一次增加25mv,直至达到1.0V。

图 1:数字电源功率级和控制级框图
1.2 待优化的输出电压波形
图2 所示的是输出电压波形,可以观察到在软启动阶段输出电压的波形不够平滑,有明显的“台阶”现象。
该波形是在一款基于UCD9224 和UCD74120 的参考版上测得。主要测试条件为:测试环境常温,输入电压为12V,输出电压为1.0V,输出端带载20A。另外,测试时,数字环路的详细配置见下文2.4 节。

图 2:输出电压波形
1.3 输出电压“台阶”现象的初步分析
图3 所示的是时间轴展开后观察到的输出电压波形。通过测量可知,每经过100us 输出电压增加一次,增加的幅度大约为23mV,与理论计算值25mV 基本一致。
同时也可以观察到,输出电压的每一次增加都是很快的完成,而不是缓慢增加。从功率级支路上分析,这是由于占空比快速增加造成。从控制级支路分析,则原因可以初步归结为环路过快造成的。

图 3:输出电压的步进幅度
2 数字电源模拟前端及环路
数字电源控制环路包含了模拟前端,数字环路补偿等模块,在配置环路时需要综合考虑。其中,数字环路还包含非线性增益模块,使能后可以有效提升整个电源的动态响应性能。
2.1 数字电源模拟前端(AFE)
图4 红色框内电路为数字电源模拟前端(Analog-Front End,AFE)的一部分,其增益可以设置为1,2,4,8 等四个不同的值。设置不同的增益,则ADC 的输出精度也随之不同,比如设置增益为4,则输出精度为2mV;设置增益为1,则输出精度为8mV。
在相同输入误差(VEAP-VEAN)的情况下,不同的AFE 增益值将直接影响环路指标。其影响趋势为,增益越大,环路带宽越宽。

图 4:数字电源的模拟前端
2.2 数字电源环路
图5 所示的是数字电源的环路框图。其中,en 是误差放大器的输出,为数字信号;yn
是误差放大器的输出,为数字信号;yn 是环路的输出,亦为数字信号,输入到PWM模块。KNLR
是环路的输出,亦为数字信号,输入到PWM模块。KNLR 模块是非线性增益模块,可以使能或禁止,下一节会进行详细分析。a1, a2, b0, b1, b2 是环路补偿的系数,允许用户修改以适应不同的功率级设计。需要说明的是,UCD92xx 内部设计有2 套a1~b2 的参数,分别用于软启动阶段和正常运行阶段。
模块是非线性增益模块,可以使能或禁止,下一节会进行详细分析。a1, a2, b0, b1, b2 是环路补偿的系数,允许用户修改以适应不同的功率级设计。需要说明的是,UCD92xx 内部设计有2 套a1~b2 的参数,分别用于软启动阶段和正常运行阶段。

图 5:数字电源环路框图
2.3 非线性增益
图5 中的KNLR模块即为非线性增益模块,其详细的框图如图6。当en 不超过lim0 时,增益为Gin0;当en超过Lim0 但不超过lim1 时,增益为Gain1;依此类推。非线性增益模块依据误差放大器的输出进行不同程度的放大,可以有效的提升动态响应性能。如果Gain0设置为1,即便使能非线性增益模块,也不会影响环路指标。如果Gain0 由1 修改为0.75 或1.25,则会影响环路指标。其影响趋势为,增益越大,环路带宽越宽。
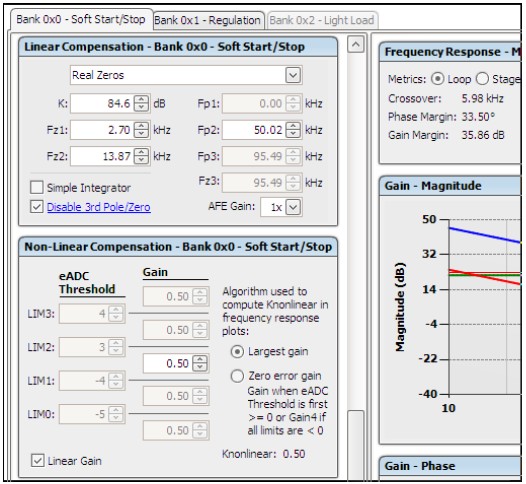
图 6:非线性增益模块
2.4 数字电源环路配置
图6 和图7 是使用数字电源开发工具Fusion Digital Power Designer 来配置环路的软件截图。该工具可以模拟整个环路并给出配置之后的闭环环路指标,包括截止频率,相位余度和增益余度,极大的方便了环路的调试和优化。
图6 所示的是软启动时的环路配置。零极点的信息在“Linear Compensation”方框中,其中AFE 的Gain 设置为4×;该配置中使能了非线性增益,其Limit 值和Gain 值是允许用户修改的。最终,整个环路的指标为23.87KHz(截止频率),49.33°(相位余度),11.77dB(增益余度)。
图7 所示的是正常运行时的环路配置。零极点的信息在“Linear Compensation”方框中,其中AFE 的Gain 为4×;该配置中使能了非线性增益,其Limit 值和Gain 值是允许用户修改的。最终,整个环路的指标为33. 7KHz(截止频率),50.57°(相位余度),8.77dB(增益余度)。
正是采样上述配置,输出电压在软启动阶段其波形有明显的“台阶状”。下面将尝试放慢环路后,验证是否可以优化软启动阶段的波形。

图 7:软启动环路配置 图 8:正常运行时的环路配置
2.5 优化环路配置
图9 是软启动环路优化后的软件截图。
环路的优化包括:1)不再使能非线性增益,同时将Gain0 由1 修改为0.5;这可以降低环路的低频增益,最终降低环路带宽;2)将AFE 的Gain 由4 修改为1,同样可以降低环路带宽。1 倍的Gain 将使AFE 的输出的精度变差,并最终影响到输出电压,但考虑到软启动阶段对输出电压的精度要求略低,因此可以上述修改可以接受。
需要说明的是,为保证正常运行时输出电压的性能(精度,动态性能等),正常运行时对应的环路参数将保持不变。
图 9:优化软启动环路参数
图10 所示的是优化环路后的输出电压波形,可以观察到在软启动阶段的“台阶”现象消失,波形平滑。
图11 是将时间轴展开后的输出电压波形,可以观察到其步进的时间依然是100us,步进的幅度为24mV(与理论值25mV 基本一致),但每一次的步进不再是突然增加,而是缓慢增加。因此,输出电压波形变得较为平滑。
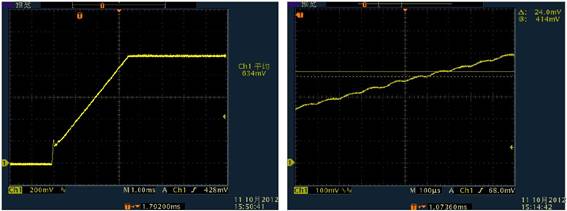
图 10:优化后的软启动波形 图 11:展开时间抽观察输出电压波形
但是,在图10 所示的波形中可以观察到,输出电压在启动时刻有一个正向过冲并很快回落。严格意义上,该过冲会影响输出电压波形的单调性,在一些应用场景中是不运行的。下文将针对该过冲进行优化。
3 调整最小驱动时间进一步优化输出波形
优化环路后输出电压在软启动阶段变得较为平滑,但会存在一个明显的过冲,需要进行优化。下文通过调整最小占空比宽度来消除该过冲。
3.1 数字电源软启动的kick-start
图12 中所示的是数字电源的输出电压软启动示意图。在开始时刻,输出电压有一个快速的上升,称之为“Kick-start”。 Kick-start 的幅度是根据下面公式计算出的:
Vstart =Vin×DRIVER_MIN_PULSE × Fsw
其中,DRIVER_MIN_PULSE 是指UCD92xx 发出的最小占空比的宽度,允许用户自行设定。

图 12:输出电压软启动
以图10 为例,输出电压Kick-start 的幅度约为185mV。其DRIVER_MIN_PULSE 设置为50ns,理论计算Kickstart的幅度为:12V×50ns×300KHz=180mV。实际值与理论值基本一致。
3.2 调整最小占空比宽度
将DRIVER_MIN_PULSE 由目前的50ns 修改为5ns,以验证其对输出电压的过冲有无改善。图13 即为输出电压波形,可以观察到过冲已经消失,但在起始时刻,输出电压不再平滑。
分析原因可知,当DRIVER_MIN_PULSE 设置为5ns 后,虽然UCD9224 可以发出宽度为5ns 的驱动脉冲,但UCD74120 对最小占空比的宽度有要求,5ns 的宽度不足以使集成在UCD74120 内部的buck 上管导通,从而造成了输出电压上升的不平滑。

图 13:最小占空比宽度修改为5ns 后的输出电压波形
过小的DRIVER_MIN_PULSE 值会使输出电压在起始时刻变得不再平滑;过大的DRIVER_MIN_PULSE 的值则会带来正向过冲。因此,需要找到一个平衡点。
逐步增大DRIVER_MIN_PULSE 的值,当设置为43ns 时,达到了较为理想的平衡点,输出电压的波形如图14所示,输出不再有正向过程,而且在整个软启动阶段输出电压波形都比较平滑。
此时,输出电压Kick-start 的幅度约为160mV。其DRIVER_MIN_PULSE 为43ns,理论计算Kick-start 的幅度为:12V×43ns×300KHz=154.8mV。实际值与理论值基本一致。

图 14:最终优化的输出电压波形
4 结论
通过修改AFE 的增益值和禁止非线性增益等措施优化软启动对应的环路参数后,可以消除输出电压的“台阶”现象,使波形单调平滑上升。正常运行的环路参数无需改动,保证了其较高的带宽,从而使输出电压的精度和动态响应等指标保持不变。
通过优化最小占空比的宽度,可以消除在kick-start 之后的正向过程,使输出电压波形单调平滑。
综上两类优化措施,最终可以使输出电压波形在整个软启动阶段单调平滑。
5 参考文献
1. UCD92xx-Design-Guide, Texas Instruments Inc., 2011
2. UCD9224 datasheet, Texas Instruments Inc., 2010
3. UCD74120 datasheet, Texas Instruments Inc., 2012
关键字:数字电源
编辑:冀凯 引用地址:数字电源UCD92xx 输出电压波形的优化
基于UCD92xx 与UCD7xxx 的非隔离数字电源,其输出电压在软启动阶段经常出现“台阶”现象,波形不平滑,尤其是输出电压设定为较低值时,如1.0V。这种“台阶”现象与UCD92xx 软启动的设计原理有关,但完全可以通过一定的措施来优化并最终解决。本文从UCD92xx 的环路和最小占空比宽度两个方向进行优化与分析,最终取得了理想的效果。
1、软启动原理及待优化输出电压波形
数字电源UCD92xx 的软启动是通过对参考电压以步进方式增加来实现的,整个过程是由芯片内部的软件自动完成的。在一款基于UCD9224 和UCD74120 的单板上测试时发现,其输出电压波形在软启动阶段有明显的“台阶”现象,波形不平滑。
1.1 数字电源软启动原理介绍
图1 所示的是数字电源UCD92xx 的功率支路和控制支路。控制支路主要集成在UCD92xx 芯片内部,包含误差生成及模数转换,环路补偿,PWM计算及产生等。其中,参考电压(VREF)电压的设置亦包含在控制支路。
依据软件算法,在软启动阶段,VREF 每100us 增加一次,直至软启动完成,即输出电压达到最终的设定值。例如,输出电压设定为1.0V,软启动的时间设置为4ms,则在软启动阶段输出电压每一次增加25mv,直至达到1.0V。
图 1:数字电源功率级和控制级框图
1.2 待优化的输出电压波形
图2 所示的是输出电压波形,可以观察到在软启动阶段输出电压的波形不够平滑,有明显的“台阶”现象。
该波形是在一款基于UCD9224 和UCD74120 的参考版上测得。主要测试条件为:测试环境常温,输入电压为12V,输出电压为1.0V,输出端带载20A。另外,测试时,数字环路的详细配置见下文2.4 节。
图 2:输出电压波形
1.3 输出电压“台阶”现象的初步分析
图3 所示的是时间轴展开后观察到的输出电压波形。通过测量可知,每经过100us 输出电压增加一次,增加的幅度大约为23mV,与理论计算值25mV 基本一致。
同时也可以观察到,输出电压的每一次增加都是很快的完成,而不是缓慢增加。从功率级支路上分析,这是由于占空比快速增加造成。从控制级支路分析,则原因可以初步归结为环路过快造成的。
图 3:输出电压的步进幅度
2 数字电源模拟前端及环路
数字电源控制环路包含了模拟前端,数字环路补偿等模块,在配置环路时需要综合考虑。其中,数字环路还包含非线性增益模块,使能后可以有效提升整个电源的动态响应性能。
2.1 数字电源模拟前端(AFE)
图4 红色框内电路为数字电源模拟前端(Analog-Front End,AFE)的一部分,其增益可以设置为1,2,4,8 等四个不同的值。设置不同的增益,则ADC 的输出精度也随之不同,比如设置增益为4,则输出精度为2mV;设置增益为1,则输出精度为8mV。
在相同输入误差(VEAP-VEAN)的情况下,不同的AFE 增益值将直接影响环路指标。其影响趋势为,增益越大,环路带宽越宽。
图 4:数字电源的模拟前端
2.2 数字电源环路
图5 所示的是数字电源的环路框图。其中,en
图 5:数字电源环路框图
2.3 非线性增益
图5 中的KNLR
图 6:非线性增益模块
2.4 数字电源环路配置
图6 和图7 是使用数字电源开发工具Fusion Digital Power Designer 来配置环路的软件截图。该工具可以模拟整个环路并给出配置之后的闭环环路指标,包括截止频率,相位余度和增益余度,极大的方便了环路的调试和优化。
图6 所示的是软启动时的环路配置。零极点的信息在“Linear Compensation”方框中,其中AFE 的Gain 设置为4×;该配置中使能了非线性增益,其Limit 值和Gain 值是允许用户修改的。最终,整个环路的指标为23.87KHz(截止频率),49.33°(相位余度),11.77dB(增益余度)。
图7 所示的是正常运行时的环路配置。零极点的信息在“Linear Compensation”方框中,其中AFE 的Gain 为4×;该配置中使能了非线性增益,其Limit 值和Gain 值是允许用户修改的。最终,整个环路的指标为33. 7KHz(截止频率),50.57°(相位余度),8.77dB(增益余度)。
正是采样上述配置,输出电压在软启动阶段其波形有明显的“台阶状”。下面将尝试放慢环路后,验证是否可以优化软启动阶段的波形。
图 7:软启动环路配置 图 8:正常运行时的环路配置
2.5 优化环路配置
图9 是软启动环路优化后的软件截图。
环路的优化包括:1)不再使能非线性增益,同时将Gain0 由1 修改为0.5;这可以降低环路的低频增益,最终降低环路带宽;2)将AFE 的Gain 由4 修改为1,同样可以降低环路带宽。1 倍的Gain 将使AFE 的输出的精度变差,并最终影响到输出电压,但考虑到软启动阶段对输出电压的精度要求略低,因此可以上述修改可以接受。
需要说明的是,为保证正常运行时输出电压的性能(精度,动态性能等),正常运行时对应的环路参数将保持不变。
图 9:优化软启动环路参数
图10 所示的是优化环路后的输出电压波形,可以观察到在软启动阶段的“台阶”现象消失,波形平滑。
图11 是将时间轴展开后的输出电压波形,可以观察到其步进的时间依然是100us,步进的幅度为24mV(与理论值25mV 基本一致),但每一次的步进不再是突然增加,而是缓慢增加。因此,输出电压波形变得较为平滑。
图 10:优化后的软启动波形 图 11:展开时间抽观察输出电压波形
但是,在图10 所示的波形中可以观察到,输出电压在启动时刻有一个正向过冲并很快回落。严格意义上,该过冲会影响输出电压波形的单调性,在一些应用场景中是不运行的。下文将针对该过冲进行优化。
3 调整最小驱动时间进一步优化输出波形
优化环路后输出电压在软启动阶段变得较为平滑,但会存在一个明显的过冲,需要进行优化。下文通过调整最小占空比宽度来消除该过冲。
3.1 数字电源软启动的kick-start
图12 中所示的是数字电源的输出电压软启动示意图。在开始时刻,输出电压有一个快速的上升,称之为“Kick-start”。 Kick-start 的幅度是根据下面公式计算出的:
Vstart =Vin×DRIVER_MIN_PULSE × Fsw
其中,DRIVER_MIN_PULSE 是指UCD92xx 发出的最小占空比的宽度,允许用户自行设定。
图 12:输出电压软启动
以图10 为例,输出电压Kick-start 的幅度约为185mV。其DRIVER_MIN_PULSE 设置为50ns,理论计算Kickstart的幅度为:12V×50ns×300KHz=180mV。实际值与理论值基本一致。
3.2 调整最小占空比宽度
将DRIVER_MIN_PULSE 由目前的50ns 修改为5ns,以验证其对输出电压的过冲有无改善。图13 即为输出电压波形,可以观察到过冲已经消失,但在起始时刻,输出电压不再平滑。
分析原因可知,当DRIVER_MIN_PULSE 设置为5ns 后,虽然UCD9224 可以发出宽度为5ns 的驱动脉冲,但UCD74120 对最小占空比的宽度有要求,5ns 的宽度不足以使集成在UCD74120 内部的buck 上管导通,从而造成了输出电压上升的不平滑。
图 13:最小占空比宽度修改为5ns 后的输出电压波形
过小的DRIVER_MIN_PULSE 值会使输出电压在起始时刻变得不再平滑;过大的DRIVER_MIN_PULSE 的值则会带来正向过冲。因此,需要找到一个平衡点。
逐步增大DRIVER_MIN_PULSE 的值,当设置为43ns 时,达到了较为理想的平衡点,输出电压的波形如图14所示,输出不再有正向过程,而且在整个软启动阶段输出电压波形都比较平滑。
此时,输出电压Kick-start 的幅度约为160mV。其DRIVER_MIN_PULSE 为43ns,理论计算Kick-start 的幅度为:12V×43ns×300KHz=154.8mV。实际值与理论值基本一致。
图 14:最终优化的输出电压波形
4 结论
通过修改AFE 的增益值和禁止非线性增益等措施优化软启动对应的环路参数后,可以消除输出电压的“台阶”现象,使波形单调平滑上升。正常运行的环路参数无需改动,保证了其较高的带宽,从而使输出电压的精度和动态响应等指标保持不变。
通过优化最小占空比的宽度,可以消除在kick-start 之后的正向过程,使输出电压波形单调平滑。
综上两类优化措施,最终可以使输出电压波形在整个软启动阶段单调平滑。
5 参考文献
1. UCD92xx-Design-Guide, Texas Instruments Inc., 2011
2. UCD9224 datasheet, Texas Instruments Inc., 2010
3. UCD74120 datasheet, Texas Instruments Inc., 2012
上一篇:新型EPS电源工作过程及仿真研究
下一篇:基于在线软件工具的数字电源 UCD92xx 反馈环路调试指南
推荐阅读最新更新时间:2023-10-12 22:22
如何利用智能MOSFET提升数字电源性能?

UCD9110或UCD9501等新上市的数字电源控制器需要具备新型的智能型集成MOSFET驱动器的支持。电源设计人员仍然对数字电源控制技术心存疑虑。他们经常将PC的蓝屏现象归咎于软件冲突。当然,这种争议会阻碍数字控制电源以及查找控制器故障期间功率级保护策略的推广。这推动了不依赖数字电源控制器信号的具备功率级内部保护功能的MOSFET驱动器的发展。 图1:数字电源的典型实施方案 图1是数字控制电源的典型实施方案。图中左侧数字电源控制器通常的工作电压为3.3V。由于控制器设计中采用了数字低电压处理方法,出于对稳定性及噪声的考虑,不能直接使用该数字控制器驱动MOSFET。控制器与功率级之
[电源管理]

低电压数字系统电源设计技术
在计算机和通信领域,为了降低系统功耗提高电源效率,系统工作电压越来越低;另外,随着信息技术和微电子工艺技术的高速发展,器件的特征尺寸越来越小,集 成电路的电源电压也越来越低。低电压器件的成本更低,性能更优,所以各大半导体公司都将3.3V、2.5V等低电压集成电路作为推广重点,如高端的 DSP、PLD/FPGA产品已广泛采用3.3V、2.5V甚至1.8V、1 5V供电。因此,低电压数字系统的电源设计,是电子工程师面临的严峻挑战。 1 采用低压差线性稳压器(LDO) 低压差线性稳压器的突出优点是具有最低的成本、最低的噪声和最低的静态电流。它的外围器件也很少,通常只有一两个旁路电容。与传统的线性稳压器相比,它的 最大优点是输入输出压差很
[新品]
数字电源系统管理降低数据中心的功耗
[电源管理]
ColdWatt 在英特尔开发论坛将展出数字电源“黑盒子”的产品功能
全球创新数字电源转换科技领导厂商ColdWatt,将在十月十五到十六日参加于台北国际会议中心举行的英特尔开发论坛。
ColdWatt执行长Joe Lamoreux表示:“ColdWatt将展出一些令人兴奋的最新技术,而正是这些技术巩固了我们在高效率数字电源转换解决方案的领导地位。我们很高兴到台北这个重要市场并参加服务器开发活动,我们也很期待可以在这里与我们的主要客户见面。” ColdWatt将在其专属摊位中(A36),展出今年初推出的高密度、高效率电源供应解决方案。使用ColdWatt高效率解决方案的IT设备供货商,不仅得以降低营运费用,还可协助他们的服务器客户达成绿色环保IT的目标。ColdWatt也计划展出其数字电源转
[焦点新闻]
[数字电源系列文章]数字电源监视和遥测
在启动和停机之间, 数字电源 器件起什么作用呢?两种核心功能是 监控 和 遥测 。监控是一种快速动作安全功能,其可防止器件和/或负载受损。遥测是一种持续的质量管理功能。《Bodo's Power Systems》杂志近期的一则广告,罗列了上述两种功能对于数字电源有以下好处:
● 优化
● 预见性维护
● 故障检测
在这我们来看看一种典型的POL内部架构,并研究其对电源系统设计的影响。
POL内部架构
图1示出了具有3个主要功能块的简化POL。
● 监控器
● 监视器
● 数字处理单元
数字处理单元是“大脑”(未示出的是内核电源转换)。数字处理单元负责处
[电源管理]
不再夸张的数字电源
• 数字电源 可以降低成本,简化你的设计,并提高精度。 • 数字电源 非常适用于输出余量设定及逐周期回路补偿。 •很多系统工程师并不想要或需要非线性 控制 或自适应补偿。 • 数字电源 能提高效率的声称通常无法证实。 •数字电源确有独特的性能,但也存在折衷。 最近,营销部门一直在大肆吹嘘已在学术界徘徊了几十年的数字电源,他们没有恶意,只是热情过度(图1)。现在,其中的一些夸张之词已经消逝,是时候讨论一下数字电源适合什么,其工作原理,缺点,以及它的折衷(参考文献1)。不过,尽管它有缺点,各家公司仍然开发和部署了一些器件,它们在不涉及折衷的情况下,充分利用了数字 控制 回路的好处。 图1,数字电源最终达到了平稳量产的阶段(Gar
[电源管理]
模拟电源管理与数字电源管理
一种新技术的引入通常需要一个过渡过程,在这个过程中,用户不断地检验新技术中实际可行的因素和不切实际内容。本文旨在澄清 模拟 与 数字 电源管理 之间的不同。从多方面考察两种技术差异及其对系统性能的影响。表1、表2分别列出了各自的优、缺点:
从用户的角度看,很难确定哪一种方式更好。不断提高的系统复杂度为考虑使用数字电源管理方案的用户铺平了道路,虽然有些设想在不久以前还看起来难以逾越。但是,数字电源产品的应用案例及其相关的一些传说表明,人们在某种程度上为数字系统所能处理的问题蒙上了一层不切实际的光环。随着这项技术步入其自然的发展轨道,应该平息其所伴随的神秘色彩以及不切实际的宣传。用户随后所面临的问题是:那一种方案最好?
[电源管理]
数字电源芯片2011年接近10亿美元
DPM在销售中占据优势,但DCP销售额增长较快 随着笔记本电脑、服务器和数字电视(DTV)等应用越来越多地采用数字控制功率半导体,该市场在未来三年内肯定会脱离初生阶段,开始迅速成长,到2011年营业收入将接近10亿美元。 iSuppli公司预测,到2011年,全球数字电源管理器(DPM)和数字控制电源(DCP)的销售额将上升到9.04亿美元,几乎是2007年销售额1.53亿美元的六倍。DPM仍将在数字电源半导体销售额中占最大份额,2011年销售额将达6.13亿美元,而预计2008年销售额是1.74亿美元,2008-2011年的复合年增长率是52.2%。但是,DCP销售额的增长将会比较快,2011年销售额将从2008
[焦点新闻]
 电源开关设计秘笈 30 例
电源开关设计秘笈 30 例 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
小广播
热门活动
换一批
更多


Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET

最新电源管理文章
- 非常见问题解答第223期:如何在没有软启动方程的情况下测量和确定软启动时序?
- Vicor高性能电源模块助力低空航空电子设备和 EVTOL的发展
- Bourns 推出两款厚膜电阻系列,具备高功率耗散能力, 采用紧凑型 TO-220 和 DPAK 封装设计
- Bourns 全新高脉冲制动电阻系列问世,展现卓越能量消散能力
- Nexperia推出新款120 V/4 A半桥栅极驱动器,进一步提高工业和汽车应用的鲁棒性和效率
- 英飞凌推出高效率、高功率密度的新一代氮化镓功率分立器件
- Vishay 新款150 V MOSFET具备业界领先的功率损耗性能
- 强茂SGT MOSFET第一代系列:创新槽沟技术 车规级60 V N通道 突破车用电子的高效表现
- 面向车载应用的 DC/DC 电源






更多热门文章
更多每日新闻
更多往期活动
11月24日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号