尿裤生产线是一个对系统的协调性要求很高的一种机械设备,要求控制系统能够提供很好的协调能力,协调各个伺服之间的动作流程,不能出现系统动作间断的情况,同时还要求伺服系统具有很好的反应能力,及时处理来自PLC的命令,以达到很高的生产效率。我们所做的这套系统是用来包装尿裤的,同时也可以用来包装卫生巾,系统各方面要求很高,整个系统控制工艺复杂,控制设备繁多,各个电机之间要求很高的协调性.该系统采用5套伺服电机控制,而每套伺服电机间均有数据交换,且数据通讯也要求很强的实时性,也就是要求系统具有总线通讯能力,这样就要求伺服驱动器拥有非常强大的功能才能满足控制要求,而Kinco伺服驱动器则能满足此类系统控制要求,下面是我们驱动器的一些功能特点:
1、全数字化的速度和位置控制功能,并提供位置、速度和扭矩的控制功能;
2、灵活多变的跟踪控制方式,提供高灵敏度的跟踪效果;
3、可编程控制的数字输入输出;
4、可监控电机短路、电压、温度、编码器、位置跟踪和电流过高等故障;
5、可通过RS232、RS485、Profibus
、CAN通讯口进行参数设定;
因此我们的伺服驱动器完全有能力胜任这份工作,下面大致介绍下这套系统:
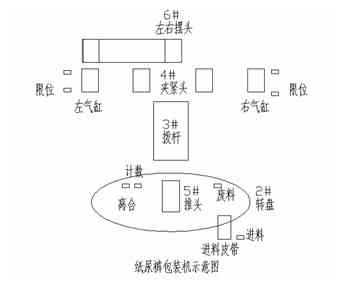
一、 工艺要求 尿裤生产线以一定的速度把生产出来的尿裤输送出来(速度从1片/分钟~360片/分钟)。尿裤包装机从接收尿裤开始,到把尿裤按要求的每包数量一包一包放入包中。首先转盘接料处有个开关,一个尿裤来后,转盘的叶片摆一次,尿裤不断进来。在转盘的另一侧有两个开关,一个检测叶片,一个检测是否缺料。拨杆把推出来的尿裤送到夹头处,夹头会把一包数量的尿裤夹紧,拨杆会继续把尿裤往前推到左右摆,然后气缸会把一包数量的尿裤推到包装袋中。
二、 方案设计
转盘、推头、拨杆、夹头、左右摆都需要伺服控制。气缸、离合、气阀需要开关量控制。还有一些检测开关,需要输入到控制器中。我们对这样一套控制系统进行了分析,认为Kinco K4带CAN总线的PLC通过CAN总线来控制Kinco伺服。eView屏与K4通过RS232与屏通讯来设定和显示参数,4通过RS485来控制变频器,这样一套控制方案应该说是最可靠、最简洁、最经济的控制方案。

三、 编程实现
控制系统的其中一个重点就是如何做到与主系统的协调。尿裤包装机的整体运行速度,它要跟随尿裤生产的速度自动调整。尿裤生产线的速度是1片/分钟~360片/分钟可调的,每包的数量不同,包装机的整体速度也是不同的。每包的数量是6包~20包可设定。这些可变的量太多,组合出来的数是非常大的。我们通过仔细分析工艺,分成四段,1片/分钟~90片/分钟、91片/分钟~180片/分钟、181片/分钟~270片/分钟、271片/分钟~360片/分钟;根据工艺的要求,我们选择了最为合适的配置和编程方式。
a) 硬件配置
选CPU模块选K406-24AR。重点进行CANOPEN主站配置,CANOPEN主站配置主要包括:主站及全局配置、网络配置、对象字典映射。详细配置如下:
主站及全局配置:
主要配置:波特率、SDO超时、网络状态输出的起始地址设定、启动时配置各从站。

网络配置:
主要配置:各伺服控制器的站号、监督类型、监督时间、寿命因子、故障处理、从站类型。

对象字典映射:
主要配置:各站的接收PDO和发送PDO。
1、接收PDO:控制字、控制模式、目标位置、最大速度、目标速度、回原点模式。
2、发送PDO:状态字、实际位置。

b) 编程
编程包括:PLC程序、触摸屏程序、伺服驱动器程序,这里只进简单的介绍。当硬件配置好后,控制伺服,就直接在PLC对应的寄存器中填写数值就可以了。
PLC主要编写了以下子程序:上电初始化、找原点、手动、自动、故障报警、故障复位等。
·上电稍延时,各设备找原点。
·手动方式:在屏上操作各设备的动作。
·自动方式:选择自动方式,启动后,自动接收尿裤,自动组片包装。
·由于转盘要跟随生产线的速度,转盘伺服的电子齿轮比要设定。也是用SDO方式。
·PLC通讯RS485与变频器通讯,改变变频器的速度。
下面是其中的一段程序,通过该段程序,可以了解到PLC是如果通过PDO的方式来控制伺服的,如下图:

四、 总结
尿裤包装机调试结束后,深受用户的好评。当尿裤生产设备完成后,全套设备连调,效果很好,该设备已发国外客户。尿裤包装机成为了该厂新的经济增长点。采用Kinco K4通过CAN总线控制Kinco智能伺服对于多轴系统是很好的解决方案,可以很好的简化系统编程、减少工程师的编程难道,同时也减少了数量众多的脉冲方向模块,为客户节省了成本。
关键字:伺服驱动器 Kinco伺服 CAN总线 小儿尿裤 转盘
引用地址:
CAN总线解决方案在小儿尿裤包装机的应用
推荐阅读最新更新时间:2024-03-30 21:27
CAN总线系统的设计与实现
在现场总线概念的出现到现在的近20年时间里,已经出现了好几种现场总线技术并走向成熟。其中CAN总线已被公认为几种最有前途的现场总线之一。 CAN是一种由带有CAN控制器组成的高性能串行数据局域通信网络,是国际上应用最广泛的现场总线之一。最初,CAN被设计作为汽车环境中的微控制器通信,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。由于其具有通信速度快、可靠性高和性能价格比好等突出优点,它正越拉越广泛地应用于汽车、机械工业、纺织机械、农业用机械、机器人、数控机床、医疗器械、家用电器及传感器等领域。图1所示是典型的CAN总线节点的系统框图。
系统硬件设计
[嵌入式]
基于CAN总线的自动离合器控制器设计
摘要: 设计了一种基于CAN 总线的自动离合器控制器, 采用高性能微处理器XC878 完成离合器控制器软硬件开发。设计了离合器执行电机的驱动 电路 及自动离合器控制程序。针对离合器与发动机协调控制的需要,设计了CAN 总线节点接口电路及一套简单、实用、高效的CAN 总线通信协议。 试验表明,所设计的自动离合器控制器在功能上满足实际应用的需要,CAN 通信模块能够准确无误地收发数据,可靠性高。 随着社会的发展, 人们对汽车的舒适性和安全性要求越来越高, 而手动档汽车因其繁重的选换档及离合器操作增加了驾驶难度。对于驾驶新手而言, 又会产生坡道起步易熄火、油耗大、离合器磨损严重等问题 。自动档汽车虽然驾驶操作简单
[汽车电子]

CAN总线在液压支架电液控制系统的应用
1 液压支架电液控制系统的通讯方式分析 液压支架电液控制系统是实现综采工作面高产高效的关键技术设备。当前国际上主流的液压支架电液控制系统有:DBT公司的PM4、MARCO公司的PM31和JOY公司的RS20型3种。在通讯方面,PM4架间通过BIDI Bus互联成综采面网络。这种方式的缺点在于,一旦控制器不能正常工作,将导致控制系统通讯的中断。PM31架间的通讯通过BIDI Bus,全工作面的互联则采用T Bus。RS20控制器间通过一条19芯强电缆连接,其中的8根线用于通讯和紧急闭锁。可以看出,PM4与PM31都采用总线的方式进行通讯,但都不是标准的现场总线。通过对3种控制器的剖析发现,它们的技术思路形成较早,且产品一直延续
[工业控制]
CAN总线技术详解
起源 20世纪80年代,Robert Bosch 公司在 SAE(汽车工程协会)大会上介绍了一种新型的串行总线——CAN控制器局域网,那也是 CAN 诞生的时刻。今天,在欧洲几乎每一辆新客车均装配有 CAN 局域网。同样,CAN也用于其他类型的交通工具,从火车到轮船或者用于 工业控制 。CAN 已经成为全球范围内最重要的总线之一 —— 甚至领导着串行总线。
CAN总线的工作原理
CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
当CAN总线上的一个节点(站)
[嵌入式]
CAN总线冷知识-边沿台阶是怎么来的?
你了解 CAN 总线波形吗?你知道是什么因素造成 CAN 信号不稳定的吗?本文将带你探究影响 CAN 波形稳定的罪魁祸首——边沿台阶。 阻抗匹配是指信号源或者传输线跟负载之间达到一种适合的搭配,阻抗匹配主要为了调整负载功率和抑制信号反射;然而,阻抗不匹配的现象在CAN总线网络中随处可见;如图1所示,阻抗不匹配的将造成7个现象,其中最受关注的为上升沿和下降沿的台阶;下文将针对边沿台阶的现象做详细介绍。 图1 阻抗不匹配波形 解释边沿台阶是怎么出现的,如何消除,对总线有何影响; 一、边沿台阶的源头 在CAN总线的网络布局中,手牵手直线型拓扑是最理想最常规的布局;但是在实际现场中,经常会出现分支的现象。这里重点提一下,在计算CAN总
[汽车电子]
保护CAN总线收发器不受静电释放和瞬态电压影响的方法
很多工业网络诸如控制器局域网 (CAN)、RS-485、RS-422和Profibus应该能够耐受终端应用中出现的恶劣系统级瞬态电压(来自于触摸操作、电感负载中断、继电器触点颤动和/或闪电电击期间的静电释放 [ESD])。如果没有与设计所要求标准相关的合适工具和知识,在设计中满足这些要求是困难的。在这篇博文中,我将讨论国际电工委员会 (IEC) 61000-4-2标准,IEC 61000-4-2 ESD测试设置和有助于保护CAN收发器的瞬态电压抑制器 (TVS) 二极管电路。 IEC 61000-4-2 ESD抗扰度测试是一个系统级测试,它仿真了一个带电操作人员对终端系统的放电过程。IEC ESD测试的特点不同于上升时间内其
[嵌入式]
CAN总线技术在工业码垛机器人控制系统中的应用研究
目前在用的工业码垛机器人种类繁多,但根据其多轴控制系统的技术特点一般可分为三种类型:1)基于PLC的多轴控制系统;2)基于PC的多轴控制系统;3)基于总线的多轴控制系统。其中,总线控制系统具有数字信号传输、系统完全开放等优点,得到广泛的应用。笔者通过研究发现,基于现场总线,尤其是CAN总线的工业码垛机器人在实际应用中具有便于组网、性价比高、扩展性强等特点,在大工业生产中具有广阔的发展前景。
工业码垛机器人 笔者所在科研团队开发的新型工业码垛机器人(机构简图如图1所示),其主体机械结构是基于平衡吊原理的七杆机构,具有承载力大、稳定性好、结构紧凑、节省能耗等特点。机器人的动力由四台交流伺服电机提供,分别负责机器人沿水平方向、沿垂直
[嵌入式]
STM32的CAN总线过滤器的配置
stm32的can总线的配置如下: CAN_InitStructure.CAN_TTCM=DISABLE;//禁止时间触发通信模式 CAN_InitStructure.CAN_ABOM=DISABLE; CAN_InitStructure.CAN_AWUM=DISABLE; CAN_InitStructure.CAN_NART=DISABLE;//CAN报文只被发送1次,不管发送的结果如何(成功、出错或仲裁丢失) CAN_InitStructure.CAN_RFLM=DISABLE; CAN_InitStructure.CAN_TXFP=DISABLE; CAN_InitStructure
[单片机]
 嵌入式系统软硬件协同设计教程:基于Xilinx Zynq-7000 (符意德)
嵌入式系统软硬件协同设计教程:基于Xilinx Zynq-7000 (符意德) CAN硬件设计
CAN硬件设计 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号