1.
如图13所示,利用AT89S51单片机的P0端口的P0.0-P0.7连接到一个共阴数码管的a-h的笔段上,数码管的公共端接地。在数码管上循环显示0-9数字,时间间隔0.2秒。
2.
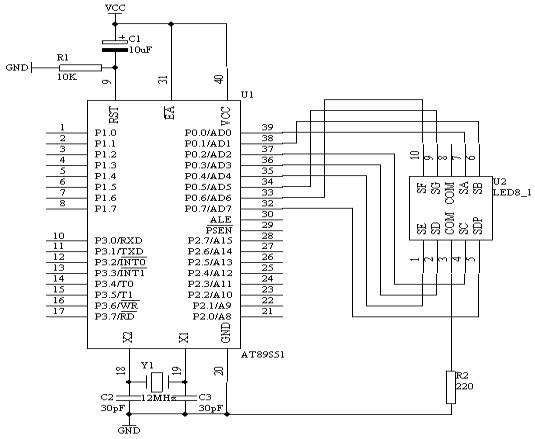
图4.7.1
3.
把“单片机系统”区域中的P0.0/AD0-P0.7/AD7端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个数码管的a-h端口上;要求:P0.0/AD0与a相连,P0.1/AD1与b相连,P0.2/AD2与c相连,……,P0.7/AD7与h相连。
4.
(1. LED数码显示原理
七段LED显示器内部由七个条形发光二极管和一个小圆点发光二极管组成,根据各管的极管的接线形式,可分成共阴极型和共阳极型。
LED数码管的g~a七个发光二极管因加正电压而发亮,因加零电压而不以发亮,不同亮暗的组合就能形成不同的字形,这种组合称之为字形码,下面给出共阴极的字形码见表2
“0”
3FH
“8”
7FH
“1”
06H
“9”
6FH
“2”
5BH
“A”
77H
“3”
4FH
“b”
7CH
“4”
66H
“C”
39H
“5”
6DH
“d”
5EH
“6”
7DH
“E”
79H
“7”
07H
“F”
71H
(2. 由于显示的数字0-9的字形码没有规律可循,只能采用查表的方式来完成我们所需的要求了。这样我们按着数字0-9的顺序,把每个数字的笔段代码按顺序排好!建立的表格如下所示:TABLE DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH

图4.7.2
6.
ORG 0
START: MOV R1,#00H
NEXT: MOV A,R1
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
LCALL DELAY
INC R1
CJNE R1,#10,NEXT
LJMP START
DELAY: MOV R5,#20
D2: MOV R6,#20
D1: MOV R7,#248
DJNZ R7,$
DJNZ R6,D1
DJNZ R5,D2
RET
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
7.
#include
unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f};
unsigned char dispcount;
void delay02s(void)
{
unsigned char i,j,k;
for(i=20;i>0;i--)
for(j=20;j>0;j--)
for(k=248;k>0;k--);
}
void main(void)
{
while(1)
{
for(dispcount=0;dispcount<10;dispcount++)
{
P0=table[dispcount];
delay02s();
}
}
}
关键字:I 并行口 直接驱动 LED显示
引用地址:7. I/O并行口直接驱动LED显示
如图13所示,利用AT89S51单片机的P0端口的P0.0-P0.7连接到一个共阴数码管的a-h的笔段上,数码管的公共端接地。在数码管上循环显示0-9数字,时间间隔0.2秒。
2.

把“单片机系统”区域中的P0.0/AD0-P0.7/AD7端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个数码管的a-h端口上;要求:P0.0/AD0与a相连,P0.1/AD1与b相连,P0.2/AD2与c相连,……,P0.7/AD7与h相连。
4.
(1. LED数码显示原理
七段LED显示器内部由七个条形发光二极管和一个小圆点发光二极管组成,根据各管的极管的接线形式,可分成共阴极型和共阳极型。
LED数码管的g~a七个发光二极管因加正电压而发亮,因加零电压而不以发亮,不同亮暗的组合就能形成不同的字形,这种组合称之为字形码,下面给出共阴极的字形码见表2
“0”
3FH
“8”
7FH
“1”
06H
“9”
6FH
“2”
5BH
“A”
77H
“3”
4FH
“b”
7CH
“4”
66H
“C”
39H
“5”
6DH
“d”
5EH
“6”
7DH
“E”
79H
“7”
07H
“F”
71H
(2. 由于显示的数字0-9的字形码没有规律可循,只能采用查表的方式来完成我们所需的要求了。这样我们按着数字0-9的顺序,把每个数字的笔段代码按顺序排好!建立的表格如下所示:TABLE DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
ORG 0
START: MOV R1,#00H
NEXT: MOV A,R1
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
LCALL DELAY
INC R1
CJNE R1,#10,NEXT
LJMP START
DELAY: MOV R5,#20
D2: MOV R6,#20
D1: MOV R7,#248
DJNZ R7,$
DJNZ R6,D1
DJNZ R5,D2
RET
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
7.
#include
unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f};
unsigned char dispcount;
void delay02s(void)
{
unsigned char i,j,k;
for(i=20;i>0;i--)
for(j=20;j>0;j--)
for(k=248;k>0;k--);
}
void main(void)
{
while(1)
{
for(dispcount=0;dispcount<10;dispcount++)
{
P0=table[dispcount];
delay02s();
}
}
}
上一篇:8. 按键识别方法之一
下一篇:6. 报警产生器
推荐阅读最新更新时间:2024-03-16 15:11
【STM32Cube_14】使用硬件I2C读写环境光强度传感器(BH1750)

本篇详细的记录了如何使用STM32CubeMX配置STM32L431RCT6的硬件I2C外设读取环境光强度传感器数据(BH1750)。 1. 准备工作 硬件准备 开发板 首先需要准备一个开发板,这里我准备的是STM32L4的开发板(BearPi): BH1750模块 BH1750FV1是两线式串行总线接口(IIC)的16位数字输出型环境光强度传感器,利用它的高分辨率可以探测较大范围内的光照强度变化(1lx - 65535lx)。 BH1750的原理图如下: 软件准备 需要安装好Keil - MDK及芯片对应的包,以便编译和下载生成的代码; 2.生成MDK工程 选择芯片型号 打开STM32CubeMX,打开
[单片机]

宝马i3和i8的制胜法宝,eDrive混合同步电机
宝马公司的为宝马i3和宝马i8配备了具有自主知识产权的eDrive混合式同步电动机,该电动机具有永磁电动机和磁阻电动机优点。宝马公司在这方面取得的进步似乎表明宝马公司找到了一个利用含有较少稀土材料的磁体来制造高功率密度和高效率电动机的方法。
左图为宝马公司2012年专利申请文件中的图纸,该图纸显示一种能提高电动机效率的方法——在电动机内,转子除了磁层,还有两组由数个充气转子凹坑组成的磁通感应组。宝马公司专利申请文件Nº2012/0267977。
宝马i3汽车配置的驱动电动机重50千克,最大输出功率为125千瓦,功率系数为2.5千瓦/千克;该电动机能输出线性功率,转速范围较高,其最高转速为1140
[汽车电子]
决战CES 2018 i宝机器人展露峥嵘
按照惯例,每年年初举办的CES科技盛会都在大程度上预测当下处于风口的科技技术。2018年的CES,从科技参展商的数量和主流技术趋势来看,自动驾驶和人工智能可以说仍然处在聚焦的位置。综观整个CES,吸引最多目光的不是自动驾驶汽车,就是智能机器人了。只是如今智能机器人领域竞争激烈,机器人的交互性、移动性、功能性和软件的拓展性都是消费者所关注的地方,各大机器人厂商想要获得更多的目光,就必须拿出真正的实力来。从今年的CES上看来,专注于家庭的服务型机器人获得了更多人的青睐。 i宝作为来自中国的专注于家庭教育的服务型机器人,在CES开展第一天就汇聚了众多同行和国际媒体的目光。这个被外媒给出“Amazing”评价的机器人到底有什么魔力能够在
[机器人]
I2C总线学习(四)--读写过程
写入过程 单片机进行写操作时,首先发送该器件的7位地址码和写方向位“0”(共8位,即一个字节),发送完后释放SDA线并在SCL线上产生第9个时钟信号。被选中的存储器器件在确认是自己的地址后,在SDA线上产生一个应答信号作为相应,单片机收到应答后就可以传送数据了。 传送数据时,单片机首先发送一个字节的被写入器件的存储区的首地址,收到存储器器件的应答后,单片机就逐个发送各数据字节,但每发送一个字节后都要等待应答。当要写入的数据传送完后,单片机应发出终止信号以结束写入操作。写入n个字节的数据格式 : 读出过程 单片机先发送该器件的7位地址码和写方向位“0”(“伪写”),发送完后释放SDA线并在SCL线上产生第9个时
[单片机]
用I/O命令访问PCI总线设备配置空间
摘要: 通过对PCI协议配置机制的分析,提出一种直接用I/O命令访问PCI总线设备配置空间的方法,给出了相应的C语言程序,并在实际应用中得到验证,从而在大多数情况下避免了复杂的驱动程序开发。
关键词: PCI总线 配置空间 操作系统
PCI总线推出以来,以其独有的特性受到众多厂商的青睐,已经成为计算机扩展总线的主流。目前,国内的许多技术人员已经具备开发PCI总线接口设备的能力。但是PCI总线的编程技术,也就是对PCI总线设备的操作技术,一直是一件让技术人员感到头疼的事情。PCI总线编程的核心技术是对相应板卡配置空间的理解和访问。一般软件编程人员基于对硬件设备原理的生疏,很难理解并操作配置空间,
[嵌入式]
LED工艺技术介绍-LED显示屏驱动芯片的应用
1 引言 LED显示屏作为一项高科技产品引起了人们的高度重视,采用计算机控制,将光、电融为一体的大屏幕智能显示屏已经应用到很多领域。LED显示屏的像素点采用LED发光二极管,将许多发光二极管以点阵方式排列起来,构成LED阵列,进而构成LED屏幕。通过不同的LED驱动方式,可得到不同效果的图像。因此驱动芯片的优劣,对LED显示屏的显示质量起着重要的作用。 LED驱动芯片可分为通用芯片和专用芯片。通用芯片一般用于LED显示屏的低端产品,如户内的单、双色屏等。最常用的通用芯片是74HC595,具有8位锁存、串一并移位寄存器和三态输出功能。每路最大可输出35 mA的电流(不是恒流)。一般IC厂家都可生产此类芯片。 由于LED是电流特性器
[电源管理]
LED显示屏信号传输的可靠性分析
正在使用中的led显示屏突然间因信号问题出现乱码,如果是在某次重大开幕式上,那损失是无法弥补的。因此如何提高信号传输的可靠性和稳定性便成为工程师不得不面对的课题。 信号在传输过程中,随着距离的增大而减弱。所以,传输介质的选择则显得尤为重要。下面以RS-485作为远距离数据传输线时要注意的事项。 1、信号的衰减 不难理解,信号无论借助何种介质传输,都会在传输过程中产生衰减。我们可以把RS-485传输电缆看成是由若干个电阻、电感和电容联合组成的等效电路,如图1所示。 导线的电阻对信号的影响很小,可以忽略不计。电缆的分布电容C主要是由双绞线的两条平行导线产生。信号的损失主要是由于电缆的分布电容和分布电感组成的L
[电源管理]
SEP4O2O在Linux下实现动作控制MP3
引言 动作识别是一个很热门的话题。试想一下一个没有任何触摸、机械按键的MP3,只要你前后左右的晃动就能进行所有最基本的控制操作,既灵动又时尚,这应当是一种全新的操作体验。本文将探讨如何设计这种通过动作来进行正常控制的MP3。 1硬件平台 1.1SEP4020嵌入式处理器 本文所述驱动程序基于SEP4020嵌入式微处理器。SEP4020是由东南大学国家专用集成电路系统工程技术研究中心设计的一款处理器,采用0.18μm标准CMOS的工艺设计,内嵌ASIXCORE(32位RISC内核,兼容ARM720T,带8kB指令数据Cache和全功能MMU)。SEP4020芯片中集成各种功能,包括: 8/16位SRA
[工业控制]
 深入理解计算机系统
深入理解计算机系统 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
小广播
热门活动
换一批
更多
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月13日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号